In de tweede week hebben wij meer gekeken naar het doel van de grijper in plaats van hoe de grijper werkt.
Hierbij hebben we een programma gemaakt waarin we onze eisen en wensen hebben verwerkt. Wat moet de grijper kunnen?
Dit is de vraag waar we ons eerst op focusten. Zo brachten we het doel van de grijper in helder licht.
Verder zijn we deze week begonnen met het testen/meten van de pneumatische actuatoren. Hier hebben we meer gekeken naar wat
we eigenlijk met de actuatoren kunnen doen en hoe we die kunnen gebruiken (wat voor bewegingen we kunnen maken).
Week 1
In de eerste week is onze groep voor het eerst bij elkaar gekomen. Onze groep bestaat uit 7 heren uit Den haag. We konden het de eerste dag al goed met elkaar vinden. De tweede vergadering die week hebben we gebruikt om ons te oriënteren op wat ons eerste werktuigkundig project inhield. Het was vrij duidelijk, we moesten met een oplossing komen om een appel te kunnen verplaatsen van de ene kant van een muurtje naar de andere kant, zonder de appel te beschadigen. Dit moest gedaan worden met behulp van 3 actuatoren. We zijn hiermee gelijk aan de slag gegaan en gekeken naar voorbeelden van bepaalde werktuigen die overal in de technische sector gebruikt worden. Vrij snel kwamen we erachter dat het idee dat we zochten veel weg had van een grijper.
Week 2
Week 3
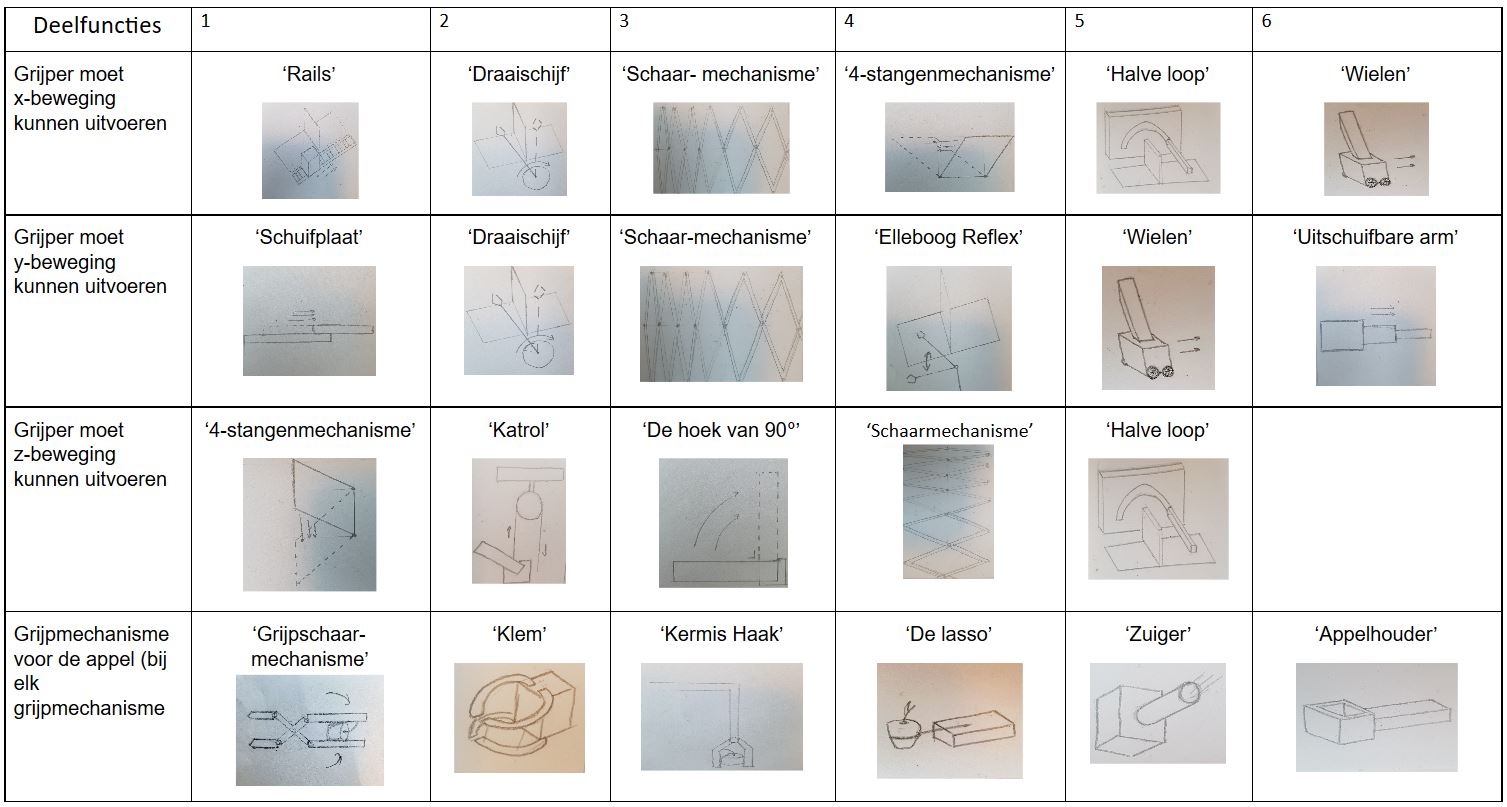
In de derde week hebben we een aantal concepten ontwikkeld. Tijdens deze week gebruikten we de morfologische kaart (zie figuur 1) en onze opgestelde eisen & wensen om onze concepten te vormen. We kwamen uiteindelijk neer op vier concepten. De vier concepten zijn rechtsboven deze pagina te vinden (klik op één van de concepten om meer informatie te krijgen). Deze concepten zijn erg divers ten opzichte van elkaar. Dit was opzettelijk, hierdoor werden we genoodzaakt in verschillende richtingen te kijken als een bepaald probleem zich voordeed.
We hebben drie spuugmodellen gemaakt: één voor het platform met een gleuf, de draaischijf en het grijpmechanisme van de draaischijf. De spuugmodellen zijn zowel hiernaast als op de pagina van de desbetreffende concept te vinden. We hebben van de overige twee concepten geen spuugmodellen gemaakt. We hebben van het concept “rails” geen spuugmodel gemaakt, omdat we tijdens het bespreken ervan achter kwamen dat het te veel tijd kost (in verhouding met de andere modellen) om een railing te bouwen met bijpassende wielen. Van de hijskraan hebben we geen spuugmodel gemaakt, omdat we ten eerste in de tijd nood waren en de hijskraan minder praktisch is dan de draaischijf: de draaischijf is compacter en heeft minder onderdelen.
Week 4
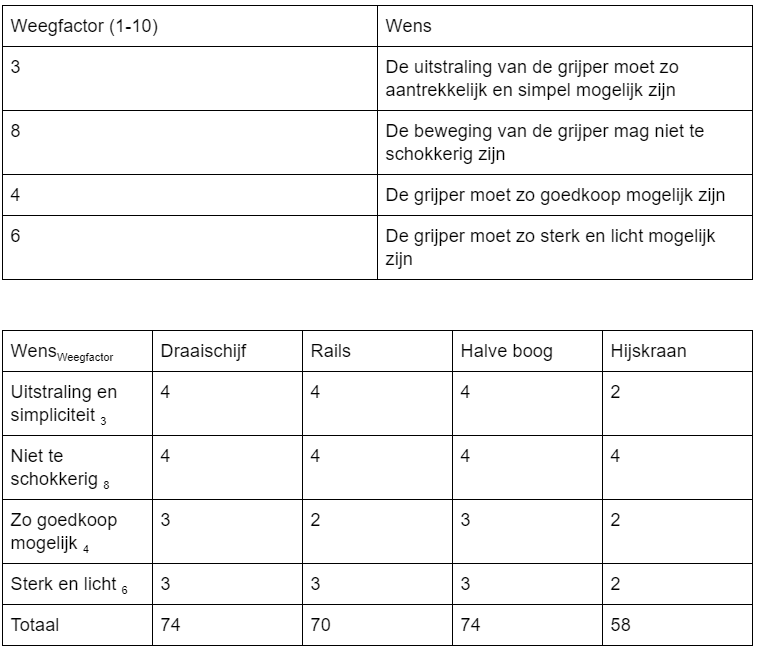
In de vierde week hebben we ons uiteindelijk concept gekozen door middel van het evalueren van bepaalde punten die elk een
weging hebben gekregen.(Zie figuur 2) Uiteindelijk is de draaischijf het geworden! Dit ontwerp bestond uit onderdelen die
merendeels uit hout konden worden gehaald. Daarom hebben we besloten om alleen de 6 bogen voor de grijper hand uit het PMMA
te laten lasersnijden. Hiervoor is er eerst een solidworks bestand gemaakt met de afmetingen van de bogen.
(Zie figuur 3).
Verder heeft Tarish een 3D model gemaakt in CATIA (zie figuur 4). Hierdoor konden we ons ontwerp beter visualiseren, hierbij konden we ook
ongeveer bepalen wat de afmetingen zouden worden van onze echte grijper.
Week 5 & 6
In de vijfde week gingen we ons uiteindelijke ontwerp bouwen. Het platform, de plaat waaruit we de draaischijf maken en de twee steunpilaren hebben we bij de Gamma op maat laten maken. We bevestigden de steunpilaren aan de draaischijf met behulp van L-haken. In het platform en de draaischijf is er een bout geplaatst zodat de schijf kon roteren. In de twee steunpilaren zijn er op allebei op twee hoogtes een gat gemaakt waar later een staaf in wordt geplaatst zodat de armen van de grijpen kunnen scharnieren. De arm van de grijper is gemaakt met behulp van 4 houten balken die als een vierstangenmechanisme dienen. Om ervoor te zorgen dat de armen elkaar niet blokkeren bij het scharnieren hebben we een blok tussen de armen geplaatst. Aan de voorkant van de arm is er een blok bevestigd met staven er doorheen waaraan de grijper wordt bevestigd. Dit systeem is zo ontworpen met behulp van het vierstangenmechanisme dat de grijperhand altijd horizontaal staat, evenwijdig aan de grond.
Week 7
In de zevende week hebben we eerst de locaties van de actuatoren bepaald ten opzichte van de grijper. Dit is gedaan door een testplatform te maken en de beweging na te bootsen. Hoe dit precies gedaan is kun je zien op pagina ‘Resultaat’. Hierop hebben we de aanpassingen verricht. We hebben constructies gebouwd om de actuatoren aan de grijper te bevestigen, rekening houdend dat deze niet helemaal vastgeklemd zitten en gedemonteerd kunnen worden. Verder hebben we die week onze grijper helemaal getest en we hebben gezien dat onze grijper goed werkt. Door het plaatsen van de grijphand is de de arm best zwaar geworden. Hiervoor hebben we een contragewicht geplaatst zodat de actuator de arm omlaag kan duwen. Resultaat was dat de arm de grond redelijk hard raakte, de appel werd gelukkig niet beschadigd. Kleine aanpassingen moeten worden gemaakt voor de actuatoren en moertjes.
Week 8
In de achtste week hebben we de groep opgesplitst. De helft ging de grijper optimaliseren door onder andere sponzen te plaatsen. De andere helft zat aan de website. Na de aanpassingen zat iedereen aan de website. De laatste AWS dag gingen we de grijper testen met de nieuwe optimalisaties en hebben we nieuwe filmpjes gemaakt. Het project is succesvol afgerond.