Het eindfilmpje: hoe werkt ons mechanisme
Introductie
Het eindproduct werkt op een aantal fundamentele principes die elk kan worden ingedeeld in één van de volgende 3 functies: Het naderen van de appel en tegelijkertijd het verplaatsen van de appel, het zakken naar de appel, het grijpen van de appel. De laatste 2 functies werken nauw met elkaar samen.
Het naderen en verplaatsen van de appel
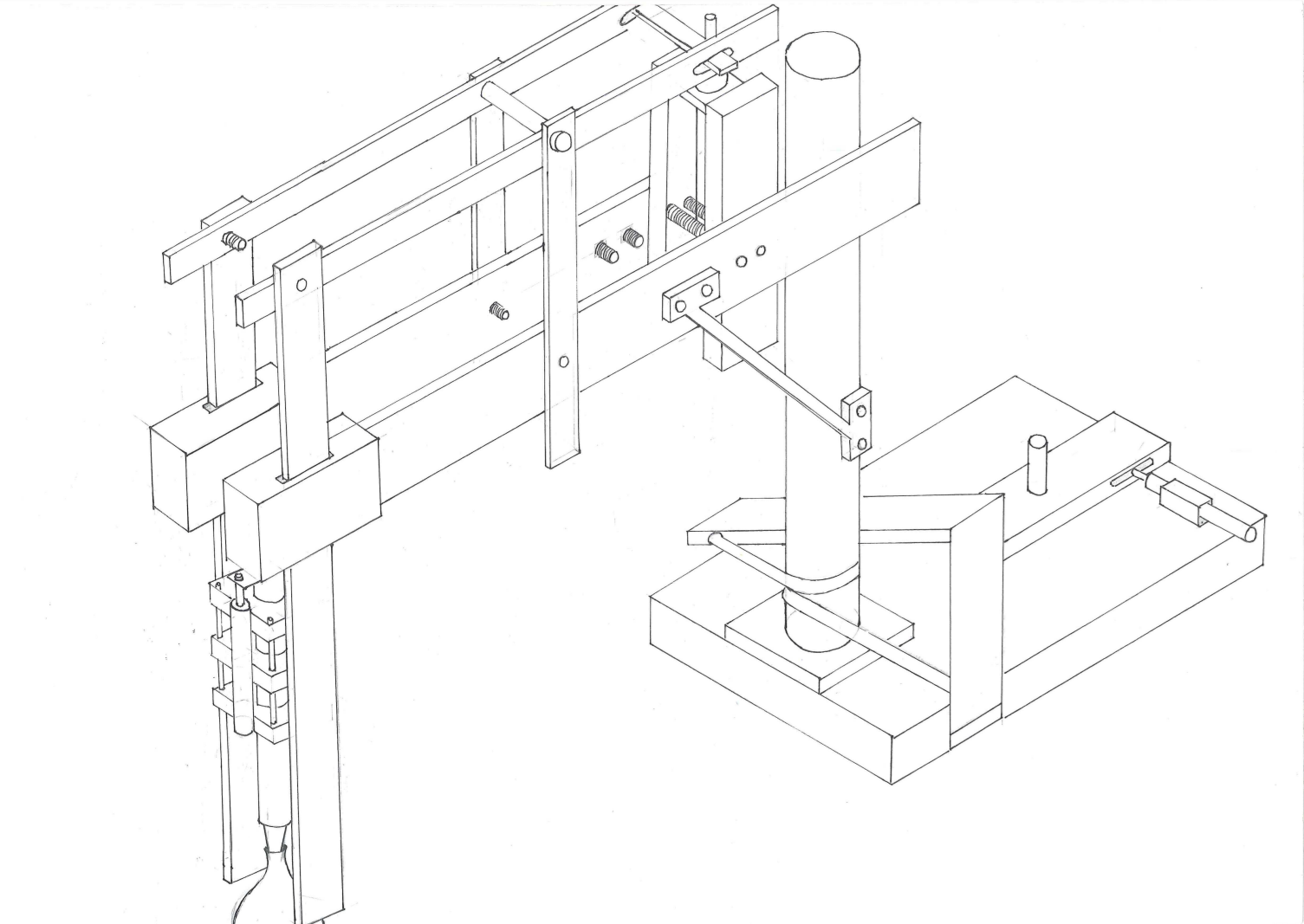
Deze functie hebben wij gerealiseerd door middel van een ‘Y’-kam constructie zoals we het zelf hebben genoemd. Met deze constructie kunnen we het mechanisme om het bord heen draaien waar de appel moet komen. Een eis hiervoor was dat het hele mechanisme op 1 as moet komen met zo weinig mogelijk wrijving. Dit hebben we gedaan door alles aan een Pvc-buis te bevestigen en hierin een fietsenlager te zetten. Vervolgens door een ‘Y’-vorm kam op een andere as te zetten en tussen de 2 uiteinden van de ‘Y’-vorm een touw te spannen die ook om de Pvc-buis wordt gewikkeld. Met de rechtlijnig beweging van de actuator aan de onderkant van de ‘Y’-kam kunnen we nu deze omzetten in een draaibeweging.

Het zakken naar de appel
Deze functie wordt vervuld door een hefboom mechanisme, een rechtlijnig beweging aan de ene kant van de hefboom zorgt nu voor een bij benadering rechtlijnige zakking van de andere kant van de hefboom (natuurlijk wel met een horizontale verplaatsing van een kleine Δl). Aan deze kant hebben we het mechanisme bevestigd die de appel zal gaan grijpen. Zo kunnen we het mechanisme dat de appel oppakt laten zakken naar de appel.
Het grijpen van de appel
Deze functie wordt gerealiseerd door het vacuüm principe. We hebben gekozen om de appel op te pakken door een ballon gevuld met gemalen koffie op de appel te drukken (het drukken wordt gedaan door de hefboom constructie, hier is de meeste kracht voor nodig, dus hebben we de grootste actuator voor de hefboomconstructie gebuikt) en vervolgens alle lucht uit de ballon te zuigen. Dit hebben we kunnen waarmaken door aan de ballon een spuit te bevestigen die door een actuator kan worden uitgeschoven waardoor de lucht uit de ballon wordt gezogen. De gemalen koffiedeeltjes komen nu dichter tegen elkaar te liggen waardoor er meer wrijving tussen de deeltjes ontstaat, vervorming kost nu meer kracht en dus blijft deze ballon die om de appel is gedrukt in deze vorm bij vacuümzuiging. Nu kan de appel worden gepakt door een rechtlijnige uitschuiving van de actuator die de spuit in werking zet.

Specificaties
Keuzes grijper en ballon
In onze concept beoordeling scoorde het criterium ‘schadeloosheid’ het op twee na hoogste. Wij hechten dus veel waarde aan het in tact laten van de appel gedurende de gehele beweging. Deze tedere manier van oppakken kon op verschillende manieren verricht worden: Een grijper met kussens of een grijper met elastieken of een veer.
Onze groep heeft gekozen voor een ballon met daarin koffiepoeder die vacuüm gezogen wordt. De reden voor dit type grijper was dat het bij het testen in de AWS relatief grote massa’s (500gram) kon optillen als er genoeg contact was tussen de ballon en het op te pakken object. Twee andere voordelen waren het feit dat koffiepoeder in een ballon makkelijk te vormen is, en dat deze manier van oppakken de appel op geen manier (behalve laten vallen) kan beschadigen. Om de ballon hebben wij een groen rubber achtig hoesje gedaan. Dit hoesje zorgt voor meer grip waardoor de appel beter blijft zitten.
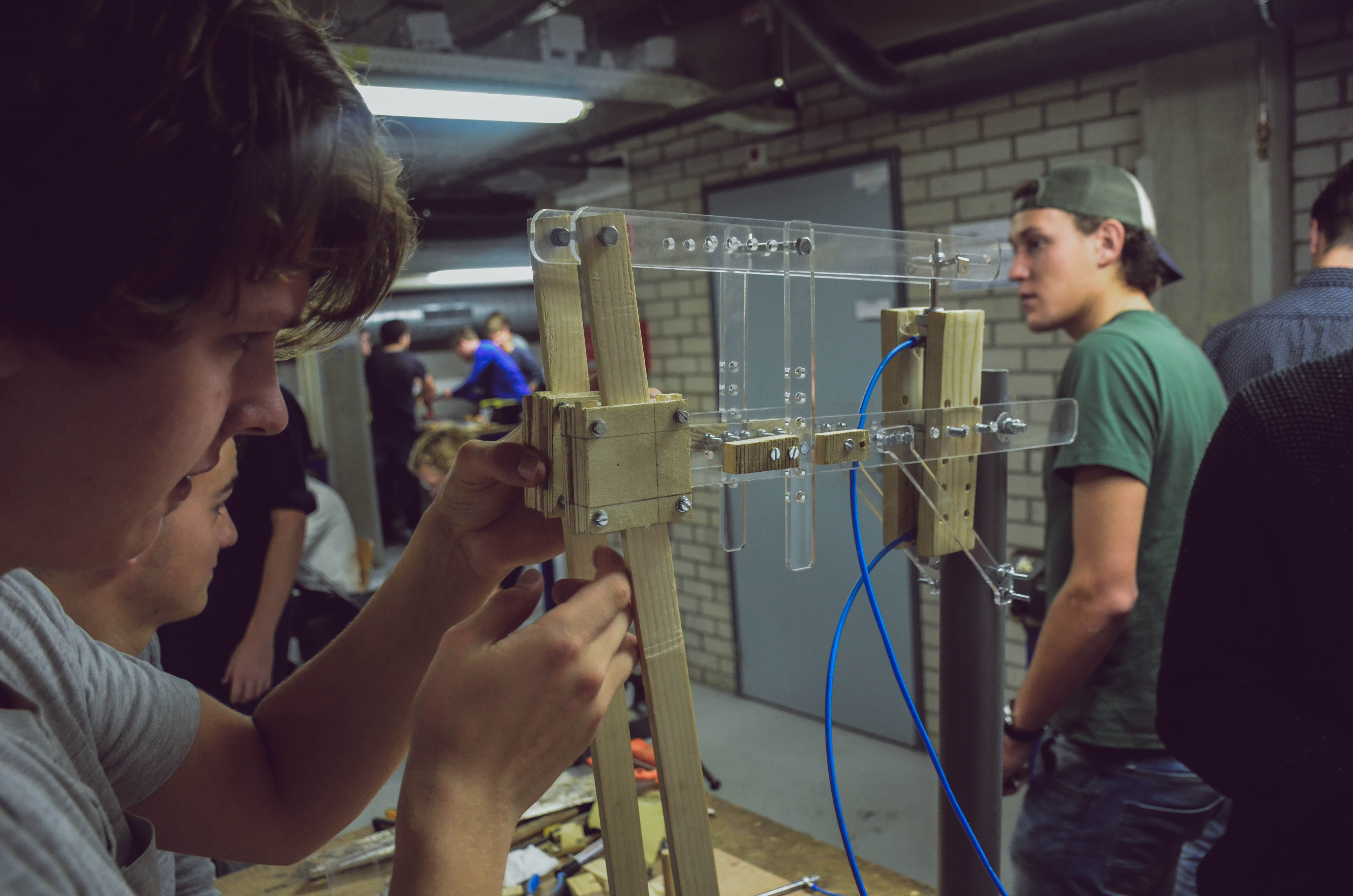
De constructie bestaat uit drie lagen waarvan twee lagen plexiglas en één laag hardhout. De hardhouten laag zit in het midden.Deze lagen liggen allen een afstand van 7.5 cm uit elkaar en hebben allen een gat voor een grote ziekenhuis spuit en voor een actuator. In de hoeken van de lagen zitten nog vier M4 gaten waar een M4 schroefdraad doorheen komt. Aan de onderkant van de ziekenhuis spuit zit een de ballon met koffiepoeder vast met een slangenklem en bovenop de spuit zit een dunne stalen plaat. Deze gehele constructie is verbonden aan de rest van het ontwerp met twee houten latten die met schroeven vastzitten aan het hardhout. Ook zitten er nog twee schroefdraden (één boven en één onder) om de onderste laag plexiglas heen.
De grijper werkt als volgt: Als de ene kant van de hefboom bovenop de arm naar boven en de andere kant dus naar beneden gedrukt wordt door de grote actuator wordt de ballon op de appel geperst. Deze neemt dan als het ware gedeeltelijk de vorm van de appel aan.
Vervolgens wordt de kleine actuator in de eerder beschreven constructie aangezet waardoor ook deze uitklapt. De kracht waarmee de actuator tegen de metalen plaat boven de spuit drukt zorgt ervoor dat deze spuit ook uitklapt, wat als gevolg heeft dat er lucht uit de ballon wordt gezogen. Het ontstane vacuüm zorgt ervoor dat het koffiepoeder dicht rondom de appel gaat zitten als een soort mal. De kracht waarmee deze mal als het ware op de appel drukt zou in theorie genoeg moeten zijn om de appel vast te houden tijdens de rest van de verplaatsing.
Keuzes rechtgeleiding en uitleg rechtgeleiding
Om de koffie-ballon optimaal te laten werken moest deze zo hard mogelijk op de appel gedrukt worden. Hiervoor moest de appel (bijna geheel) verticaal benaderd worden door de grijper. Om dit te bewerkstelligen is er een recht-geleidingssysteem bedacht. Het systeem werkt als volgt: Twee houten planken met ertussen aan de uitersten twee stukjes hout. Tussen deze stukjes hout loopt de lat die vast zit aan de constructie die op de appel gedrukt wordt. Één van deze stukken is volledig recht en de ander verschilt in breedte bovenin zodat het stuk de mogelijkheid heeft om deels te draaien. Het gat aan de onderkant is precies even groot als de breedte en dikte van de lat die er doorheen beweegt zodat deze lat aan de onderkant recht omlaag gedrukt wordt.
De reden voor de speling is dat de lat die tussen de platen doorloopt aan een hefboom vastzit. Deze hefboom maakt een gedeelte van een cirkelbeweging bij het op en neer bewegen van de actuator die eraan verbonden zit. De horizontale afstand van de op en neer bewegende lat verschilt dus ook. Dit probleem wordt verholpen met de speling die ontstaat door het ene stuk hout tussen de planken te laten oplopen.
We hebben vooral gekozen voor dit design omdat het simpel doch degelijk is. Er gaat bijna geen kracht verloren aan de wrijving van het hout op hout contact doordat alles glad gevijld is.
De materiaalkeuze is vooral ontstaan uit een gebrek aan ruimte op het lasersnij-bestand. De hefboom, behuizing voor de actuator naast de spuit en de draaiarm bestonden namelijk al bijna volledig uit dit materiaal. Ook hoefde dit onderdeel nauwelijks krachten op te vangen. Ten slotte is hout makkelijk bewerkbaar en zijn er veelal latten van dezelfde dikte als het PMMA (5mm) beschikbaar. Dit leidde ertoe dat we hebben gekozen om dit onderdeel van hout te maken.
Keuzes PMMA en arm
Tijdens het project was het mogelijk om een aantal onderdelen, van de grijper, uit PMMA te laten snijden. we hadden een beperkte afmeting waaruit we mochten snijden dus moesten we kiezen welk onderdeel uit PMMA gemaakt zou moeten worden. Als eerste keken we naar het draaimechanisme. Het was onhandig om dit onderdeel van PMMA te maken omdat we een ronde vorm nodig hadden en de vorm veel PMMA zou gebruiken.
We hebben er uiteindelijk voor gekozen om de arm van PMMA te maken. Dit was erg handig omdat we veel ‘extra’ gaten in de arm wouden. Deze ‘extra gaten’ kunnen worden gebruikt om onderdelen, die vast moeten zitten aan de arm, te verplaatsen langs de arm.
Met deze reden hebben we de verticale steunarm van de hefboom en de hefboom zelf ook van het PMMA laten maken. Omdat de verticale steunarm tijdens het grijpen zou kunnen bewegen hebben we een diagonale steunarm gemaakt van metaal zodat deze arm goed op zijn plek blijft zitten.
Ook zijn de steunbalken van PMMA gemaakt zodat ze precies op de arm bevestigd kunnen worden.
Wat wij vooral van PMMA wilden maken was de behuizing van de spuit (die voor het ‘vacuüm zuigen’ zorgt). Met Solidworks konden de afmetingen van de spuit en de actuator goed in het PMMA bewerkt worden zodat de spuit goed vast komt te zitten in het PMMA. het vast komen zitten is erg belangrijk omdat er veel druk op de spuit wordt gezet zodat de ballon vacuüm wordt gezogen.
Ook is er een klein stuk PMMA gesneden voor de grote actuator, die de hefboom omhoog en omlaag verplaatst. In dit stuk PMMA zit een gat zodat een deel van de actuator hierin kan schuiven. Aan de bovenkant van het PMMA stukje wordt de actuator vastgeschroefd. Er is in dit kleine stuk dus een groot gat nodig. hierdoor leek het ons verstandig om dit onderdeel van PMMA te maken.
Keuzes basis, 'Y'-kam en PVC-buis
Als basis hebben wij een rechthoekig multiplex houten plank genomen. Hierin kunnen we boren en schroeven om alles stabiel vast te zetten.
De pvc-buis waaraan het grootste deel van ons mechanisme vastzit, is bevestigt met een fietswiel-as met hierin kogellagers, die op maat is uitgeslepen en goed is ingevet. Hierdoor gaat het draaien zo soepel mogelijk, dit is nodig omdat er een relatief groot gewicht aan de buis komt te hangen, met een niet gelagerde as zal de buis gaan vastlopen. Deze as is in de buis geschoven en vastgezet.
Deze fietswiel-as hebben we aan een gelakte plank bevestigt die vervolgens weer op de basis is vastgeschroefd met op de plek van de moer van de fietswiel-as een gat om zo de buis via onder te kunnen monteren en demonteren. Zo is het mechanisme makkelijker in de lockers op te slaan en te vervoeren.
De ‘y’-kam is gemaakt van 3 vurenhouten latjes. Hierin hebben we een gat geboord waar een houten as doorheen gaat met voldoende speling zodat de ‘y’-kam hieromheen kan draaien. Hier is geen lager nodig omdat hier geen krachten op komen die de as kan laten vastlopen. Deze as zit wel muurvast in de basis zelf, zodat deze wel stabiel is. Aan de punten van de ‘y’-kam zijn 2 gaatjes geboord waarna een touwtje doorheen is getrokken. Ook zit aan de onderkant van de ‘y’-kam een systeem van PMMA bevestigt waaraan de actuator kan worden bevestigt om de ‘y’-kam te laten draaien.
Onderaan de pvc-buis zit een schuurpapiertje bevestigt door middel van dubbelzijdig tape om de wrijving tussen het touwtje en de pvc-buis te maximaliseren. Zo zal het touwtje niet slippen over de pvc-buis en is het draaimechanisme betrouwbaarder.
Afmetingen
basis
- onderplaat: 44 cm, 61 cm, 1.7 cm
- uitstekel: 4,5 cm
´y´-kam
- lengte basis y-kam: 39,5 cm
- breedte “: 4,8 cm
- dikte “: 2,0 cm
- afmetingen pmma op y-kam lengte: 11,0 cm
- “breedte: 1.7 cm
- gat in pmma breedte: 5 mm
- gat in pmma lengte: 10 cm
- gat in y-kam diameter: 1.5 cm
- lengte y-kam : 22 cm
- spanwijdte: 34 cm
pvc-buis
- diameter: 5 cm
- lengte: 54 cm
hoofd-arm (2x)
- lengte pmma: 43 cm
- hoogte: 3.5 cm
- dikte: 5 mm
houten omhulsel voor de grote actuator op de hoofd-arm (2x)
- lengte:17 cm
- breedte: 4,5 cm
- dikte: 1.5 cm
pmma stukje met gat voor grote actuator in het houten omhulsel
- lengte: 5 cm
- breedte: 2.8 cm
- diameter gat: 1.5 cm
verstevigingsbalk voor de hoofd-arm (driehoeksconstructie) (2x)
- lengte: 19 cm
- breedte: 1.5 cm
verticale steun voor hefboom (2x)
- lengte: 21 cm
- breedte: 2 cm
metalen diagonale versteviging voor de verticale steun (driehoeksconstructie) (2x)
- lengte: 10 cm
- breedte: 1 cm
hefboomarm (2x)
- lengte: 35 cm
- breedte: 3 cm
- lengte schuifgat: 3.5 cm
- diameter gaten: 6 mm
rechtgeleiding (2x)
- 7x7 cm
- dikte : 3 cm
latje door de rechtgeleiding (2x)
- lengte: 46 cm
- breedte: 2.7 cm
- dikte: 7 mm
vacuüm spuit
- lengte: 20 cm
- breedte 3 cm
omhulsel voor de vacuüm spuit
- lengte 18 cm
- breedte: 6.5 cm
- dikte: 4.5 cm
houten basis voor het drukmechanisme
- lengte: 10 cm
- breedte: 9 cm
- dikte: 6 mm
drukmechanisme van pvc voor het drukken van de ballon om de appel
- diameter: 8 cm
- hoogte: 5 cm