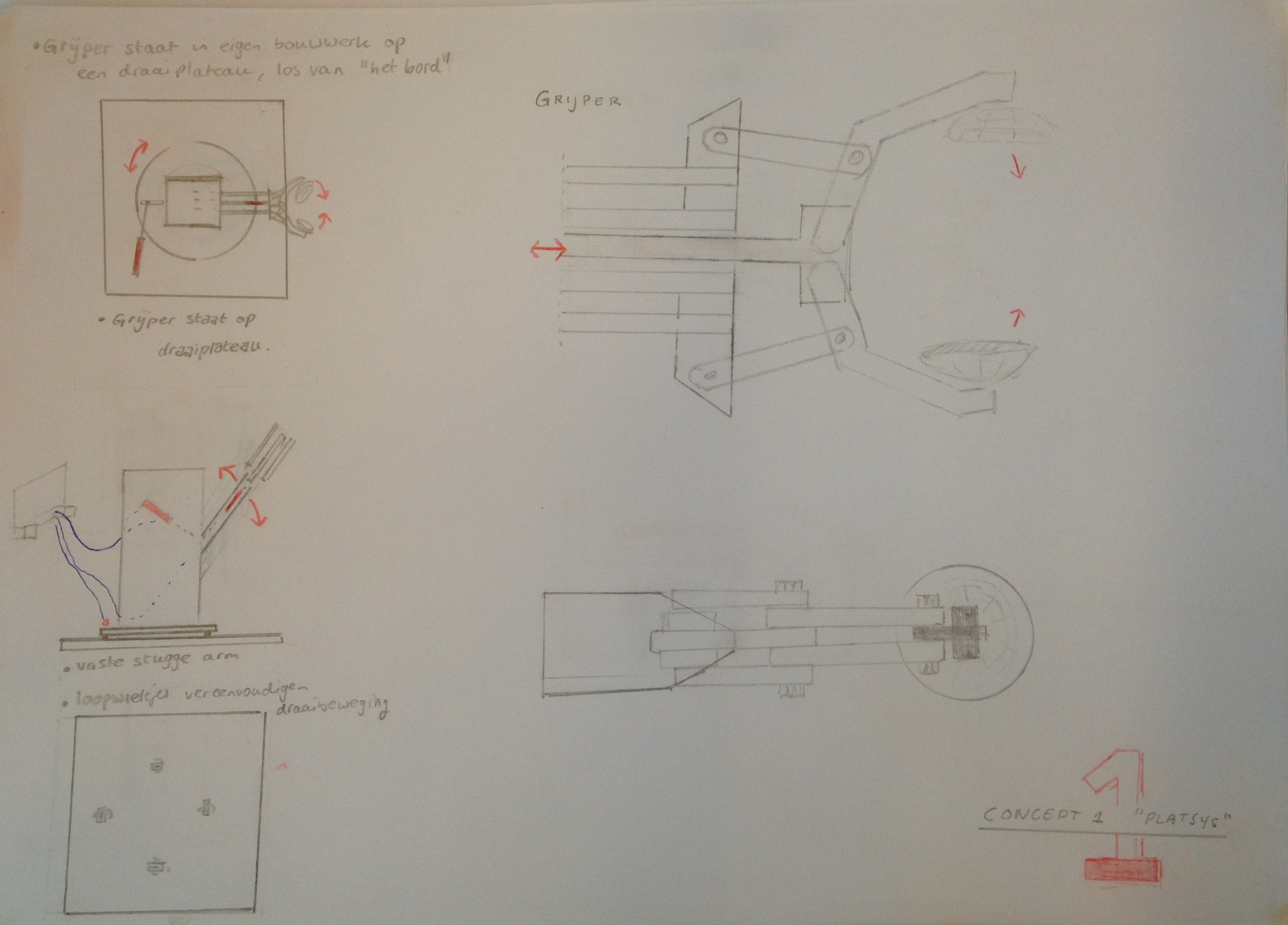
Aan het begin van de week werden de drie concepten nadere bekeken en getekend. Hieruit volgende de volgende drie concepten: Na veel discussiëren en schetsen, is een morfologische kaart opgesteld. Op deze kaart stonden van verschillende categorieën verschillende ideeën, zoals te zien op de afbeelding hiernaast. Voor hieruit concepten samengesteld werden hebben we ervoor gezorgd dat iedereen de werking van deze verschillende ideeën snapte. Na een discussie zijn de volgende concepten naar voren gekomen, samengesteld uit deze morfologische kaart: Concept 1: het ‘Platsys’ Dit concept is vernoemd naar zijn meest typerende onderdeel: een draaiplateau. Het concept is simpel: Op een houten plaat staat een draaiplateau, waarop een toren is gemonteerd waar vanuit een parallellogram-vormige arm beweegt. Aan het einde van deze arm zit een grijper zoals in de schets te zien, simpel en robuust. De grote voordelen die werden gezien in dit ontwerp waren vooral gedreven door de simpliciteit: Bewegingen worden compleet van elkaar geïsoleerd. Een draaiend plateau waarop de grijperconstructie staat zorgt ervoor dat deze om zijn as kan draaien. De draaiende beweging is hierbij geïsoleerd van de andere twee bewegingen. Bovendien zouden de locaties waar de actuatoren konden worden bevestigd makkelijk verstelbaar zijn. Op dit draaiplateau staat een toren van hout, waar vanuit een parallellogram-vormige arm beweegt. Aan het einde hiervan zit een klem, volgens een bewezen principe, zoals hij bijvoorbeeld ook wordt toegepast in afvalknijpers. Aan het einde van deze klem zitten twee halve bollen, die de appel geheel ‘opslokken’. In dit concept werden echter ook nadelen voorzien. Doordat de constructie op zichzelf staat, is het mogelijk dat deze instabiel zou worden. Door de grootte van de constructie werd aan de uitvoerbaarheid ook getwijfeld: er zou veel werk moeten worden verzet om tot een eindresultaat te komen.
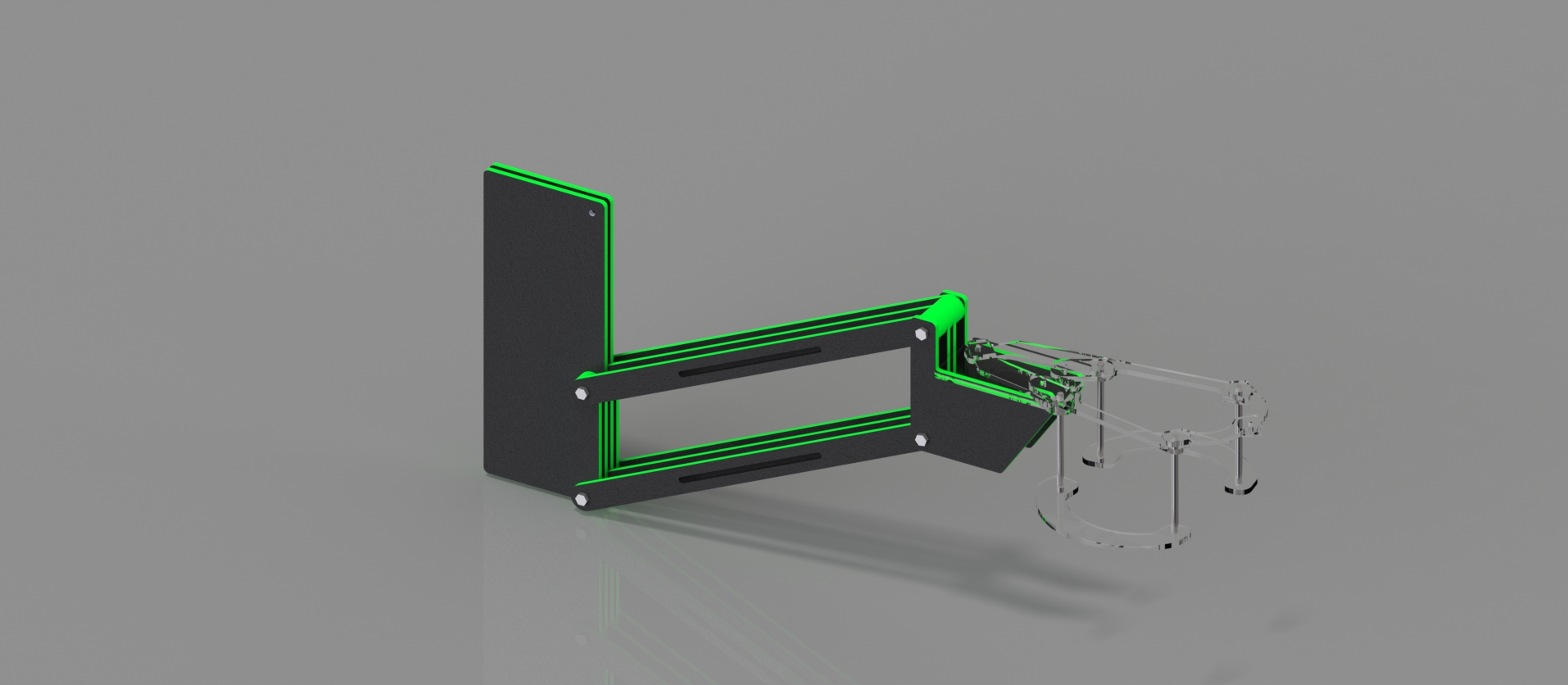
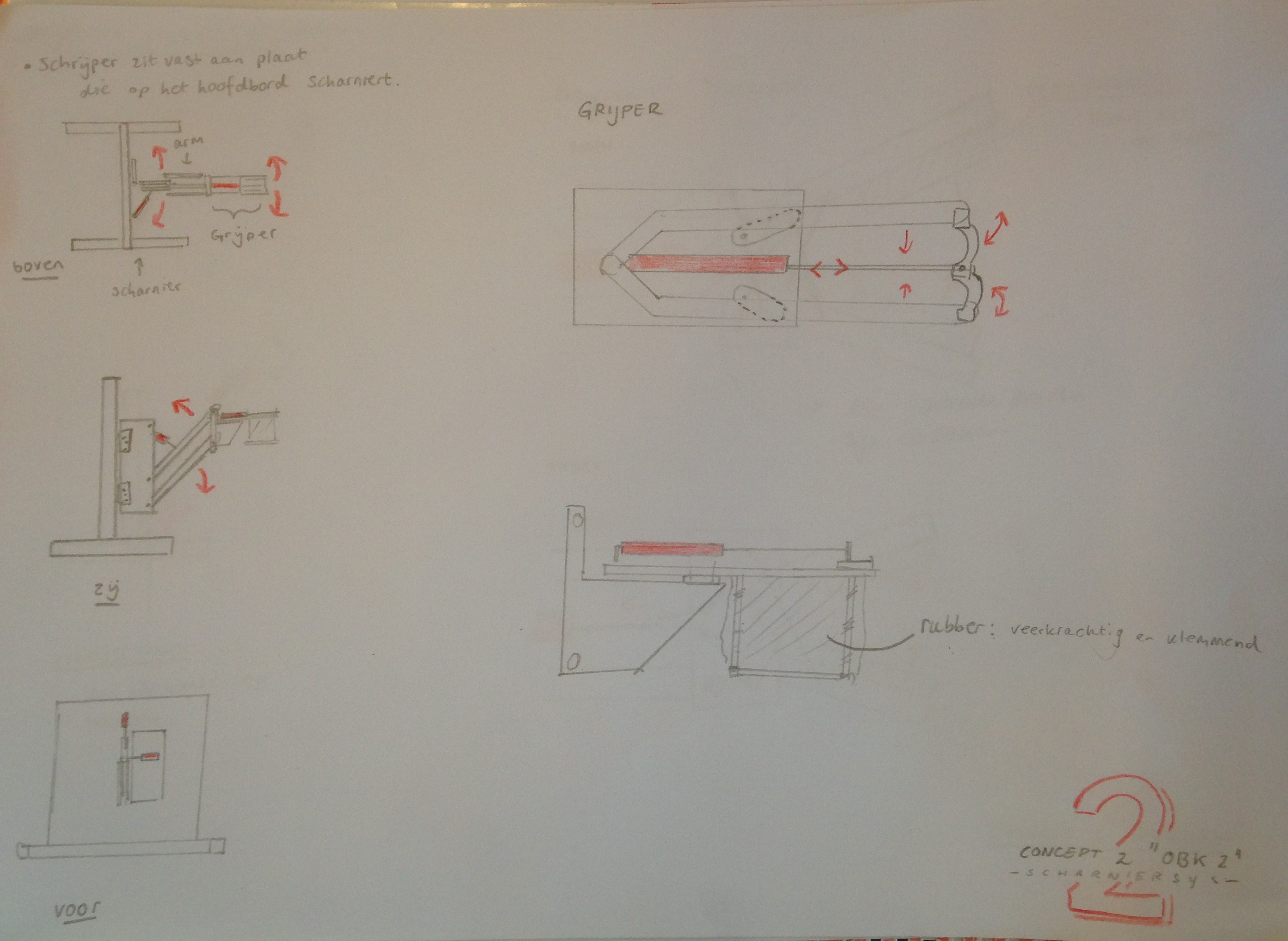
Concept 2: ‘OBK 2’ Dit concept is volgens de traditionele Russische beschrijving van prototypes Objekt 2 of OBK 2 genoemd. Dit concept leunt voort op het idee van het isoleren van bewegingen, zoals ook in concept 1 gezien is, maar probeert de uitvoerbaarheid te vergroten. Het concept werkt als volgt: Op het grote, stevige bord dat ons in de AWS is aangeleverd wordt een houten plaat gemonteerd, waarop een andere dubbele houten plaat scharniert. (Zie schets). Dit zorgt voor de beweging van links naar rechts. Aan deze dubbele houten plaat is volgens het parallellogram-principe een grijparm bevestigd, die op zijn beurt weer met een actuator aan de scharnierende dubbele plaat bevestigd is. Aan het einde van deze arm zit een opmerkelijke, maar inventieve grijper. Die vooral een antwoord moet zijn op de ongedoseerde brute kracht uit de actuatoren. De appel word gepakt in twee rubberen flappen die aan de grijperarmen bevestigd zitten. Deze zijn stroef en flexibel tegelijkertijd, waardoor de appel in het rubber wordt geklemd. Een groot voordeel van dit ontwerp is de uitvoerbaarheid, de precisie en de verwachte betrouwbaarheid. Door het gebruik van stevige materialen en veel bouten en moeren zal hij waarschijnlijk niet snel kapot gaan. De grote twijfel die dit ontwerp opriep was de experimentele grijper. De grote omvang en ingewikkelde werking zou tegen ons kunnen werken. De verwachte voordelen op basis van precisie en het niet fijn kunnen knijpen van de appel leken deze keuze echter meer dan waard.
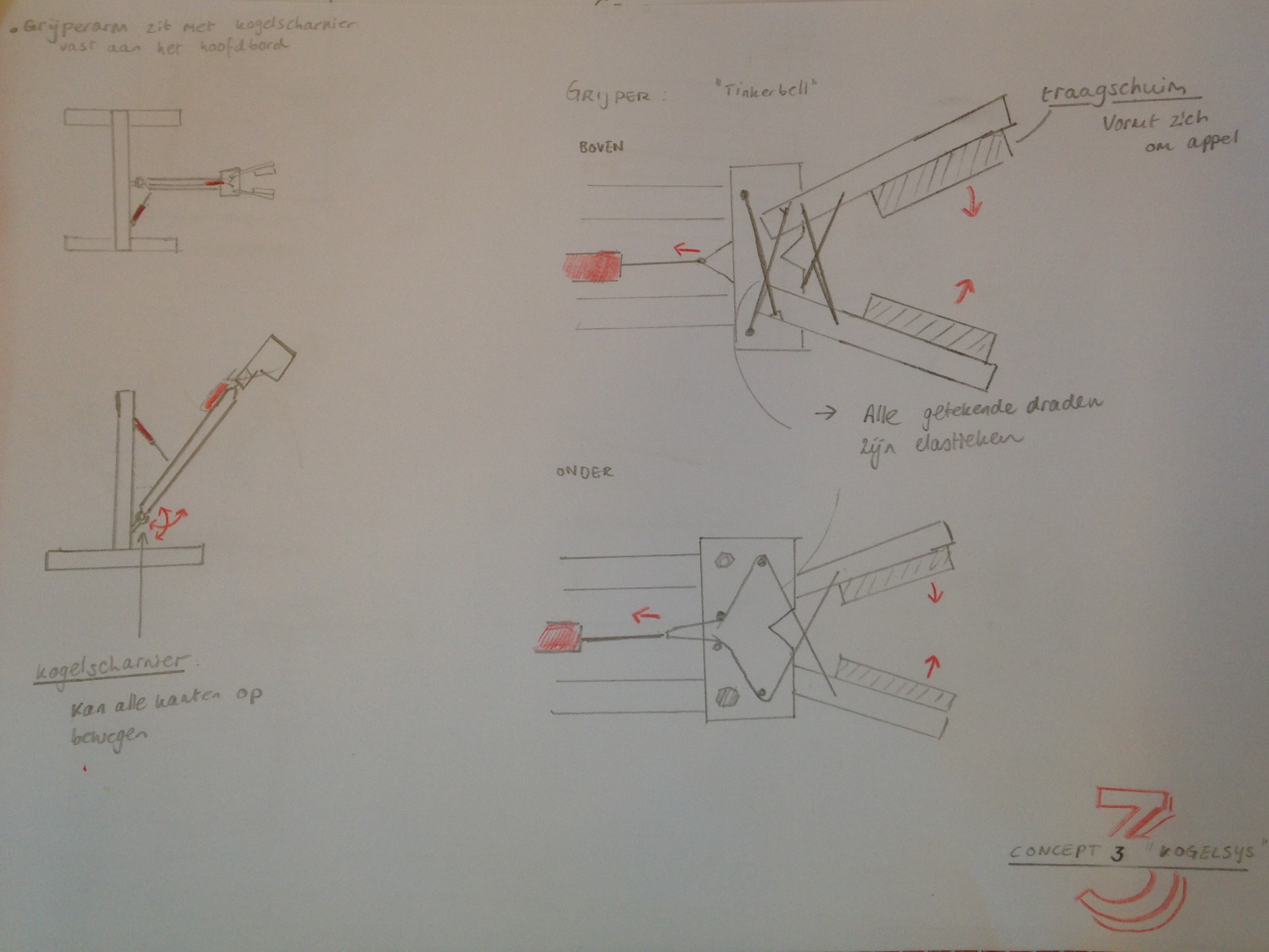
Concept 3 ‘kogelsys’ Concept 3 is genoemd daar zijn meest vitale onderdeel, een kogelscharnier. Aan dit kogelscharnier zou een arm komen, waaraan alle actuatoren bevestigd zouden worden. Dit concept bevat dan ook de minste onderdelen van de drie concepten. Het kogelscharnier zorgt ervoor dat alle bewegingen kunnen worden uitgevoerd op deze ene as, zodat ingewikkelde, tijdrovende andere constructies thuis konden blijven. Aan het einde van deze arm zou een grijper worden bevestigd, die door middel van elastieken in en uit elkaar getrokken zou worden. Dit alles om het fijnknijpen of beschadigen van de appel te voorkomen. Optioneel konden de armen van de grijper worden voorzien van traagschuim, om de knijpende beweging te dempen. Deze gehele constructie zou worden bevestigd aan het witte, door de AWS aangeleverde, bord. De gevaren van dit concept zouden naar verwachting veroorzaakt worden door ‘belangenverstrengeling’: door dat alle actuatoren bevestigd zouden worden aan een arm, die dankzij het kogelscharnier alle kanten op kan bewegen, zou de precisie waarschijnlijk ver te zoeken zijn, en zou het geheel waarschijnlijk niet erg betrouwbaar worden.
Uiteindelijk hebben we al groep op basis van deze concepten de keuze-tabellen ingevuld en zo een weloverwogen keuze gemaakt.
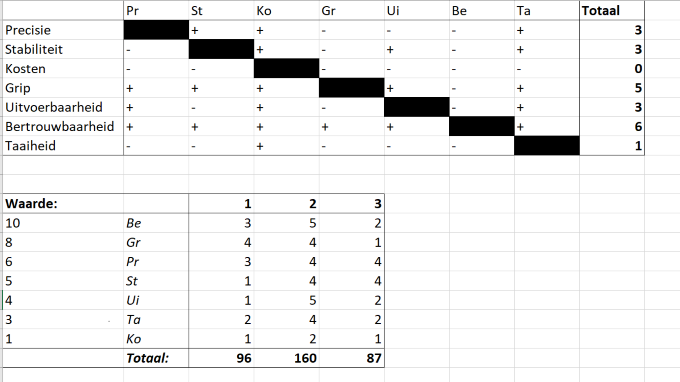
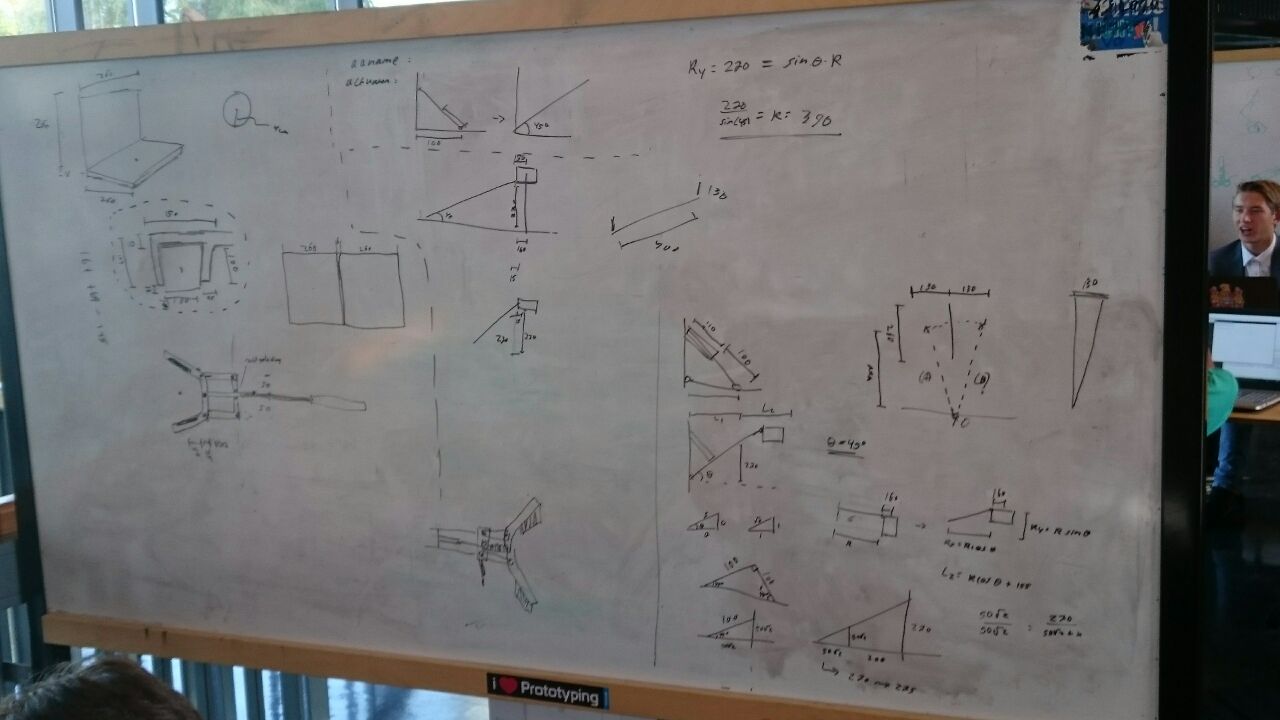
In het eerste tabel is er gekeken naar de verschillende aspecten die het grijpsysteem zou hebben: welke is het belangrijkst per twee, en welke is uiteindelijk het belangrijkst. Zoals u kunt zien vonden wij vooral betrouwbaarheid een groot goed: in totaal 6 punten. Op de ranglijst eindigen we via grip (5), betrouwbaarheid (3), uiteindelijk bij de taaiheid (onverwoestbaarheid, 1 pnt). Deze verschillende aspecten hebben wij vervolgens gelinkt aan de drie concepten, zoals te zien in de tweede tabel. Er was een duidelijke winnaar. Door ons werd concept 2 gezien als het concept die op alle vlakken waarschijnlijk het best zou gaan presteren. De hoogste precisie, de beste uitvoerbaarheid en goede stabiliteit. Van het gekozen concept werden berekening gemaakt om de ruimtelijke en daarmee ook de dynamische dimensies te bepalen.
Nu deze dimensies nader bepaald waren, kon het 1:1 spuugmodel gemaakt worden. Dit spuugmodel is vervolgens getest in het AWS met actuatoren om te bepalen of alle berekeningen, dimensies en aannames daadwerkelijk in de echte wereld werkte.
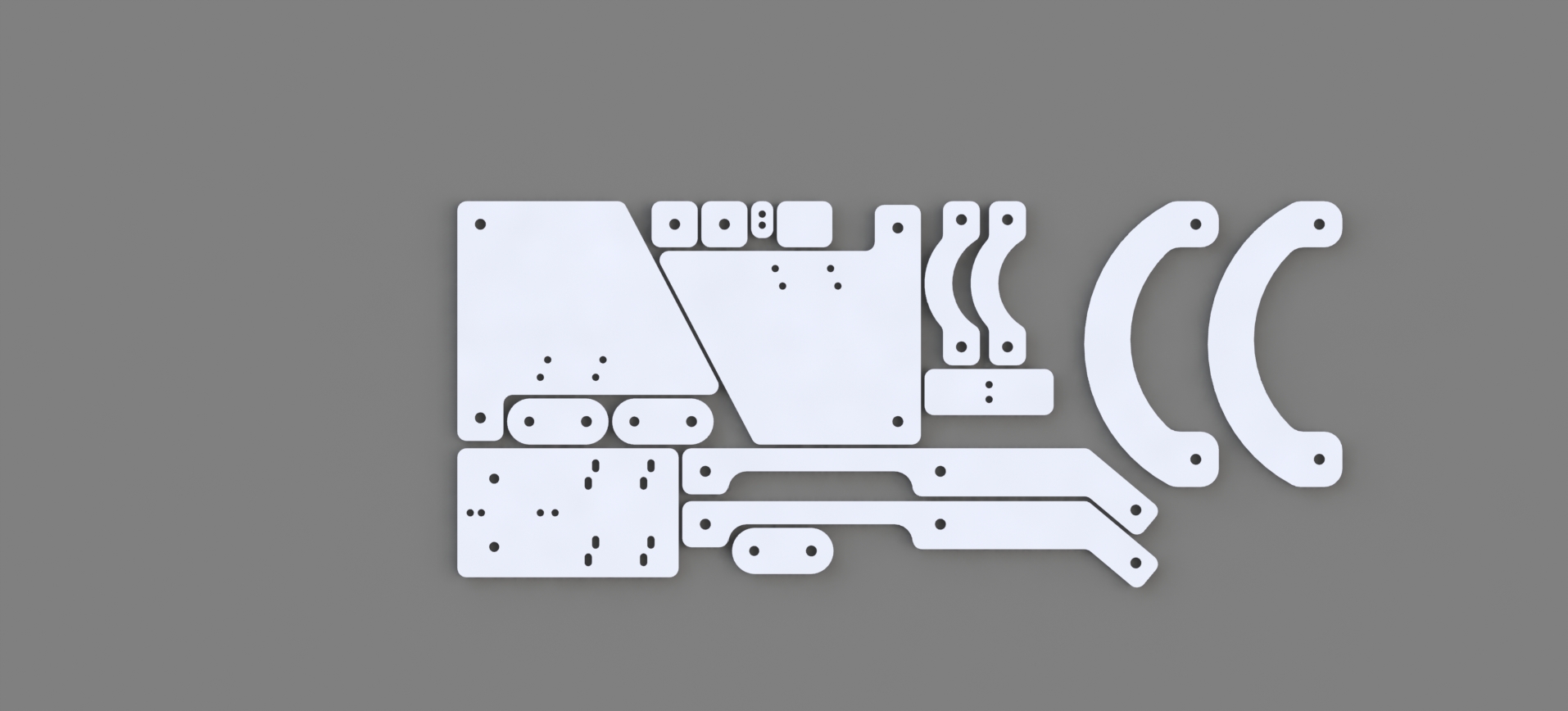
Nu bepaald was dat het concept en diens dimensies correct waren, werden tekening gemaakt van elk onderdeel in de grijper. Deze onderdelen werd vervolgens in solidworks ingetekend zodat de onderdelen naar de lasersnijder konden. Hierbij is besloten om het grijp mechanisme van PMMA te maken. De reden hiervoor is, omdat het grijpmechanisme werkt op basis van geometrie en elke afwijking funest kan zijn. Dankzij de lasersnijder kon gegarandeerd worden dat eventuele afwijkingen in het grijpmechanisme dermate klein waren, dat deze waarschijnlijk geen invloed zouden hebben op de werking van het grijpmechanisme. De overige onderdelen zouden uit MDF, draadstaal en rubber gemaakt worden.