
Ontwerpproces
Nadat we een keuze hadden gemaakt voor ons uiteindelijk ontwerp moest er worden nagedacht over hoe we het geheel het best konden combineren. Verder moest er met de gestelde eisen in het achterhoofd worden bepaald welke afmetingen elk onderdeel van de grijper moest hebben. De grijper moest namelijk een bepaalde verticale en horizontale afstand kunnen afleggen, maar er was slechts een bepaalde hoeveelheid perspex beschikbaar. We hebben hiertoe met een prototype, een matlab model en met berekeningen bepaald wat de beste oplossing was voor het eindontwerp.
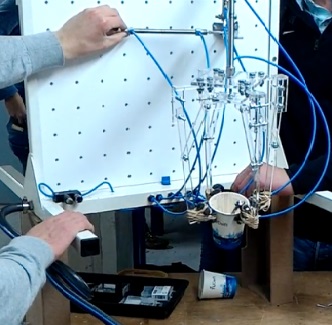
Allereerst hebben we een kartonnen prototype gemaakt om te zien of het ontwerp in de praktijk werkt. Het prototype hebben we getest door het aan te drijven met actuatoren en te bevestigen aan het frame.
Matlab
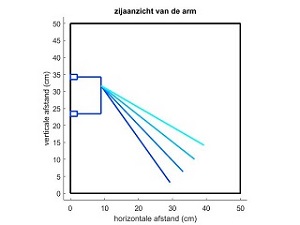
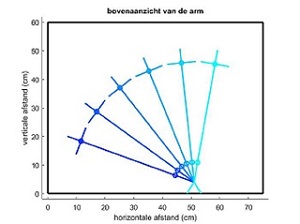
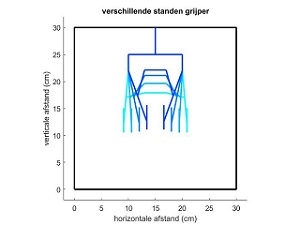
Dit zijn de Matlab figuren van de verschillende standen van de arm en de grijper. van links naar rechts zijn het het zijaanzicht van de arm aan het frame, het bovenaanzicht van de arm aan het frame en een vooraanzicht van de grijper aan de arm.
Berekeningen
Grijper:
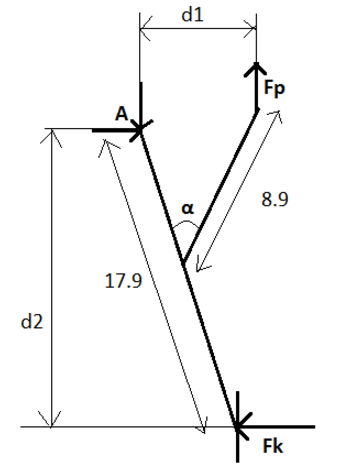
Hierboven is een van de vier vingers van de grijper weergegeven. Punt A zit vastgelijmd aan de bevestigingsplaat van de grijper en blijft dus op dezelfde plek. Kracht Fp grijpt aan op de aandrijf member en heeft een grootte van 14keer de actuator kracht. Fk is de kracht die het vastgeklemde voorwerp uitoefent op de gripplaat. Sommige metingen in de tekening zijn berekend in het 3D model van SolidWorks.
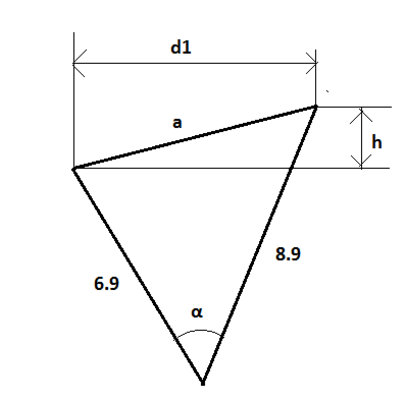
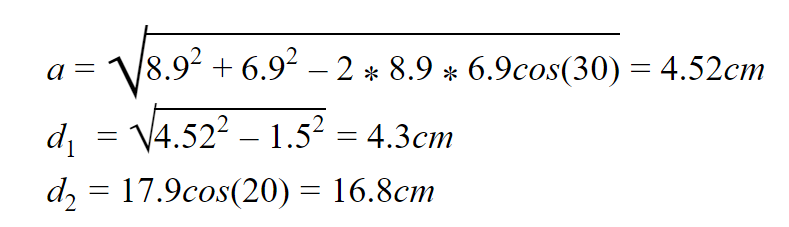
De lengte van d’ kan worden berekend met geometrische vergelijkingen. Hoek alfa in de dichte stand van de grijper is 30 graden. Hoogte ‘h’ is gemeten in de SolidWorks met de functie dY. Eerst kan zijde ‘a’ worden met de cosinusregel:
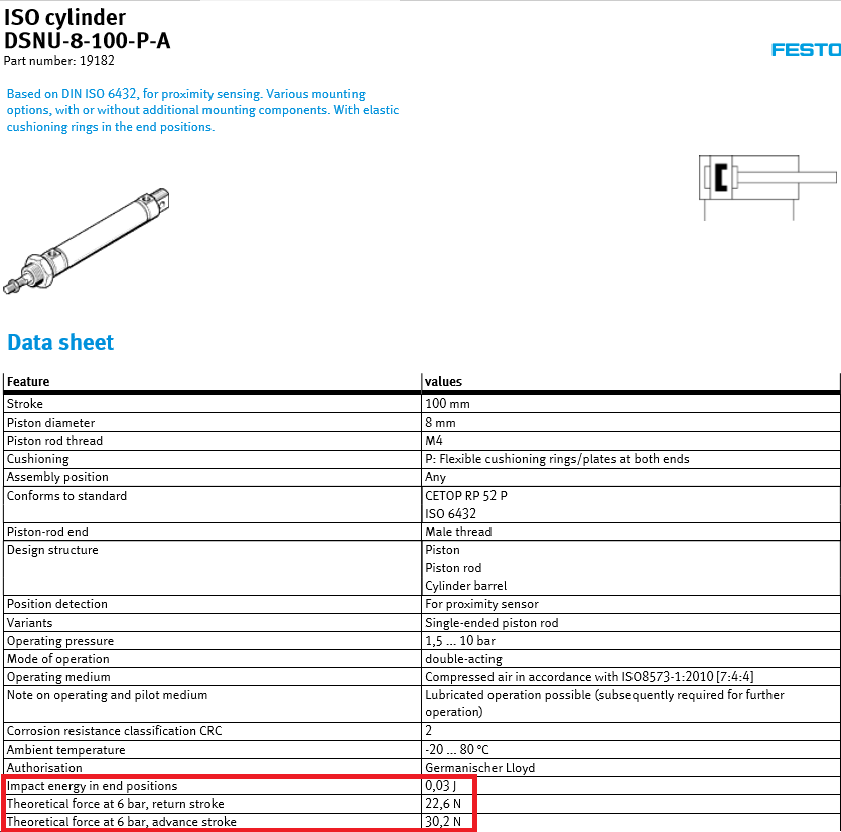
Hierboven is de datasheet weergeven van de 8mm actuator van Festo die wij gebruiken voor de grijper.
Wij maken een berekening van 3 Bar. Eerst doen wij de berekening van Fp. Daarvoor maken hebben wij een verhouding van de advance stroke en de return stroke in de datasheet, want de knijpkracht wordt bepaald met de advance stroke.

De grijper heeft dus een knijpkracht van 0.72N per arm, dit zou genoeg moeten zijn om het object te klemmen en het object geen schade aan te brengen.
Arm:
Nogmaals is alles berekend voor de situatie van 3Bar aan luchtdruk. Alle lengtes in de figuren zijn gemeten in Solidworks.


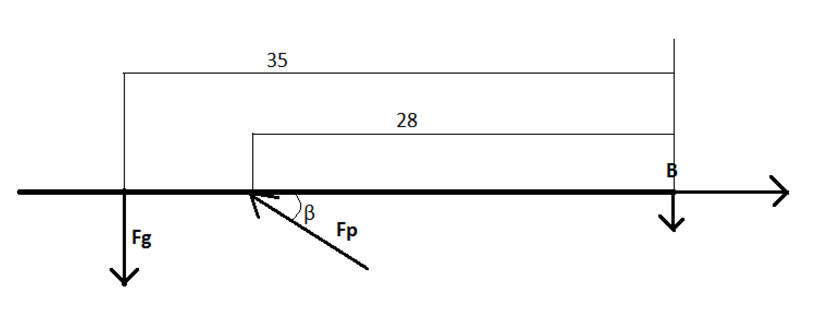
Om het maximale gewicht te berekenen die grijper kan tillen moet er een momentenevenwicht genomen worden rond een vast scharnierpunt. Hieronder worden de krachten in de arm van de grijper beschouwd. Punt B is een vast scharnierpunt. Fp en Fg zijn de krachten die de actuator en de grijper uitoefenen op de arm.
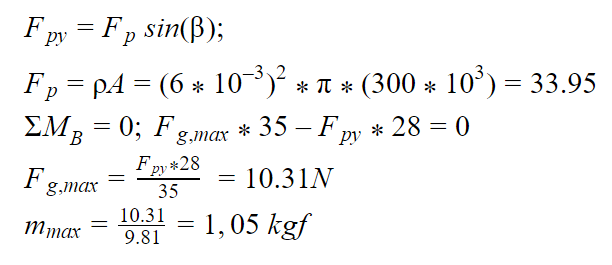
De actuator kan dus 1,05 kgf tillen bij een luchtdruk van 3 Bar.
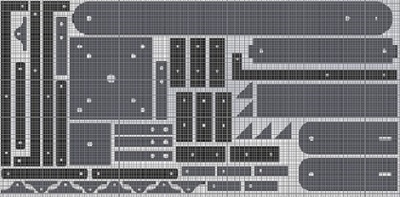
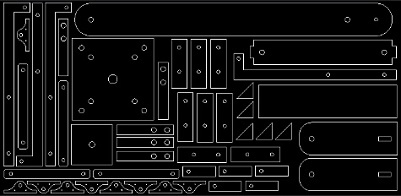
Lasersnijden
Wij hebben ervoor gekozen om de grijper volledig te maken van perspex. Perspex heeft namelijk gunstige materiaaleigenschappen, waarvan een hoge dichtheid van 1.18 g/cm³. Verder wilden we zoveel mogelijk de kosten te drukken door de materialen te gebruiken die vanuit de TU beschikbaar waren. Als eerst hebben wij van alle individuele onderdelen een 3D ontwerp gemaakt om daarna in SolidWorks Assembly de bewegingen en joints te testen. Daarna hadden wij wat moeite om de individuele onderdelen in een DXF-file te zetten. Wij hebben de onderdelen in een DXF file gezet door de 3D onderdelen in een aparte Assembly file te zetten en er vanuit één perspectief er tegen aan te kijken. We hebben als eerst een sketch gemaakt met een linear pattern, om de perspexplaat te weergeven, met 3x3mm rasters om goed de onderdelen te passen. Daarna hebben wij deze Assembly in een SolidWorks Drawing gezet met een schaal van 1:1. Van deze Drawing hebben wij uiteindelijk een DXF file gemaakt.