
Ontwerp
Ontwerp arm
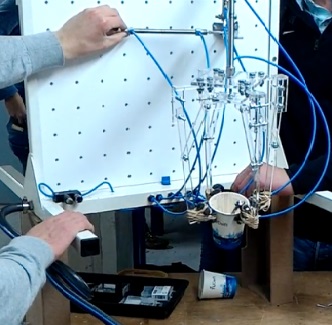
Na het keuze proces zijn we tot de verschillende keuzes gekomen, horizontale mechanisme optie 1, verticale mechanisme optie 3 en grijper optie 1.
afbeelding 1

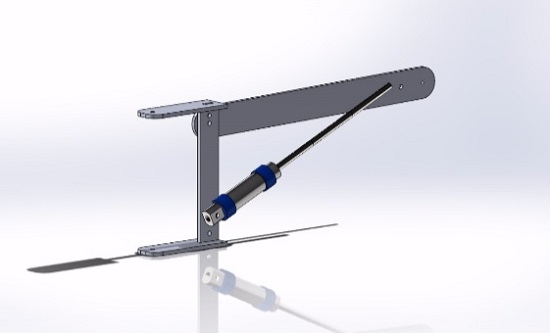
afbeelding 2

Afbeelding 3
De arm van de grijper wordt bevestigd aan het draaimechanisme. Het draaimechanisme is opgebouwd uit drie verschillende onderdelen namelijk: twee plaatjes waarmee het mechanisme aan het bord bevestigd kan worden en een drager waar de actuator en arm aan bevestigd worden. In het onderste plaatje zit een gat waaraan we de actuator kunnen bevestigen. Deze actuator bevestiging hebben we zelf gemaakt uit een aluminium pijpje. We hebben schroefdraad in dit pijpje gemaakt waarmee het pijpje aan de actuator bevestigd kan worden. Aan het uiteinde van het pijpje zit een gat waarmee we het pijpje aan het mechanisme kunnen bevestigen, zie afbeelding 2. Op het de drager zit de actuator en de arm bevestigd hiervoor hoefde we geen extra onderdelen te maken, alleen wat ringetjes voor een soepele draai. Bij de bevestiging van de actuator aan de arm liepen we nog wel tegen een probleem. Dit hebben we opgelost doormiddel van een koppelmoer met een gat erin, zie afbeelding 3.
Ontwerp grijper
Wij hebben de grijper zo ontworpen dat er een gelijke krachtverdeling op het object, de armen en de frame van de grijper. Dit hebben wij bereikt door 4 grijp armen te gebruiken. Verder moest de actuator geen grote krachten leveren op de grijper zodat de grijper risico liep op instorten. Wij vonden het belangrijk dat de grijper zich kon vormen om de omtrek van het object. Dit hebben wij gedaan door aan het einde van elke arm twee plaatjes te monteren die vrij kunnen draaien langs de arm heen.
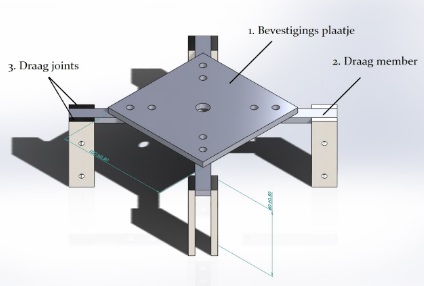
figuur 1.1: Top van de grijper

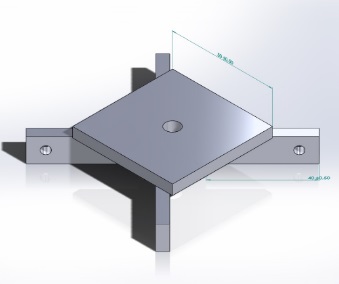
figuur 1.2: Grote gat, bevestigingsplaat
In figuur 1.1 is de top van de grijper weergeven, met de 3 verschillende onderdelen benoemd. Onderdeel 1 is de bevestigingsplaat(100x100mm), deze plaat wordt als ‘plafond’ van de grijper gezien. De grote gat in het midden dient voor een 8mm actuator. Dit gat hebben wij met M12 draad getapt, zoals te zien is in figuur 1.2. Zo kan de actuator in dit gat worden geschroefd. Ook zitten er nog 8 M6 gaten in voor de bouten die de draag members(2) bevestigen aan de plaat. Onderdeel 3 zijn draag joints, hier hebben wij acht van. De draag joints worden met plastic lijm bevestigd aan de draag member. Verder worden nog 2 bouten per draag join gebruikt om ten eerste de armen van de grijper te bevestigen en voor een goede mechanische connectie te zorgen.
figuur 2.1. Aandrijf member
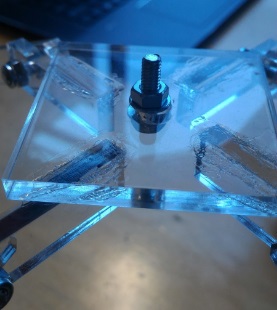
figuur 2.2. Aan de bout wordt een koppelmoer bevestigd die ook aan de piston rod van de actuator wordt bevestigd.
In figuur 2.1 is het aandrijf member weergeven. Dit onderdeel is een (50x50mm) laat waar 4 joint members aan worden gelijmd met plastic lijm. Door de gat van de plaat dient een bout te worden bevestigd die weer met een koppelmoer aan de piston rod van de actuator wordt bevestigd. Wanneer de actuator uitgeschoven wordt de aanvoer member naar beneden geduwd met een theoretische kracht van 11,3 Newton, zoals eerder berekend bij het ontwerpproces. Deze aanvoer member duwt onder een hoek van 100180graden tegen de link member (later verder behandeld).
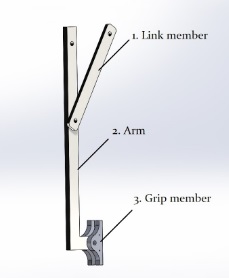
figuur 3.1. Arm
In figuur 3.1 is één van de vier armen van de grijper weergeven met de bijbehorende onderdelen. Onderdeel 1 is de link member van de arm, hier duwt de aandrijf member tegen aan en duwt de arm, onderdeel 2, open. De arm wordt ook nog eens bevestigd aan de draag joints weergeven in figuur 1.1. Onderdeel 3 zijn grip members, hier wordt een materiaal met een hoog wrijvingscoëfficiënt aan bevestigd, bijvoorbeeld: schuurpapier. Door de hoge wrijvingscoëfficiënt zal de grijper minder moeite hebben om de objecten op te pakken.
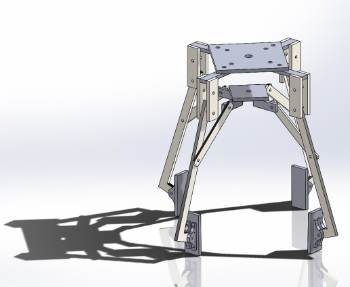
figuur 4.1. 3D model van het uiteindelijk resultaat.