Ontwerp 1 was het eerste ontwerp die we bedacht hebben. De opdracht was toen om met 3 actuatoren
de appel te verplaatsen, maar met het gebruik van 2 actuatoren zouden er bonuspunten kunnen worden
behaald. We probeerden dus een ontwerp te bedenken waarbij we maar 2 actuatoren nodig zouden hebben,
vanuit daar zouden we als we tegen een probleem aanliepen eventueel een derde actuator kunnen gebruiken
om dit op te lossen. Één actuator zouden we sowieso nodig hebben om de appel te grijpen. Aangezien er veel
verschillende opties zijn voor een grijper, hebben we ons per ontwerp mee gericht op hoe we de appel
over of om het bord heen konden plaatsen. De standaard denkmethode om een appel een horizontale en
verticale verplaatsing te geven zou het gebruik van 2 actuatoren zijn. Eentje zorgt voor de verticale
verplaatsing, en de ander voor de horizontale. Echter zou met een draaiende beweging beide verplaatsingen
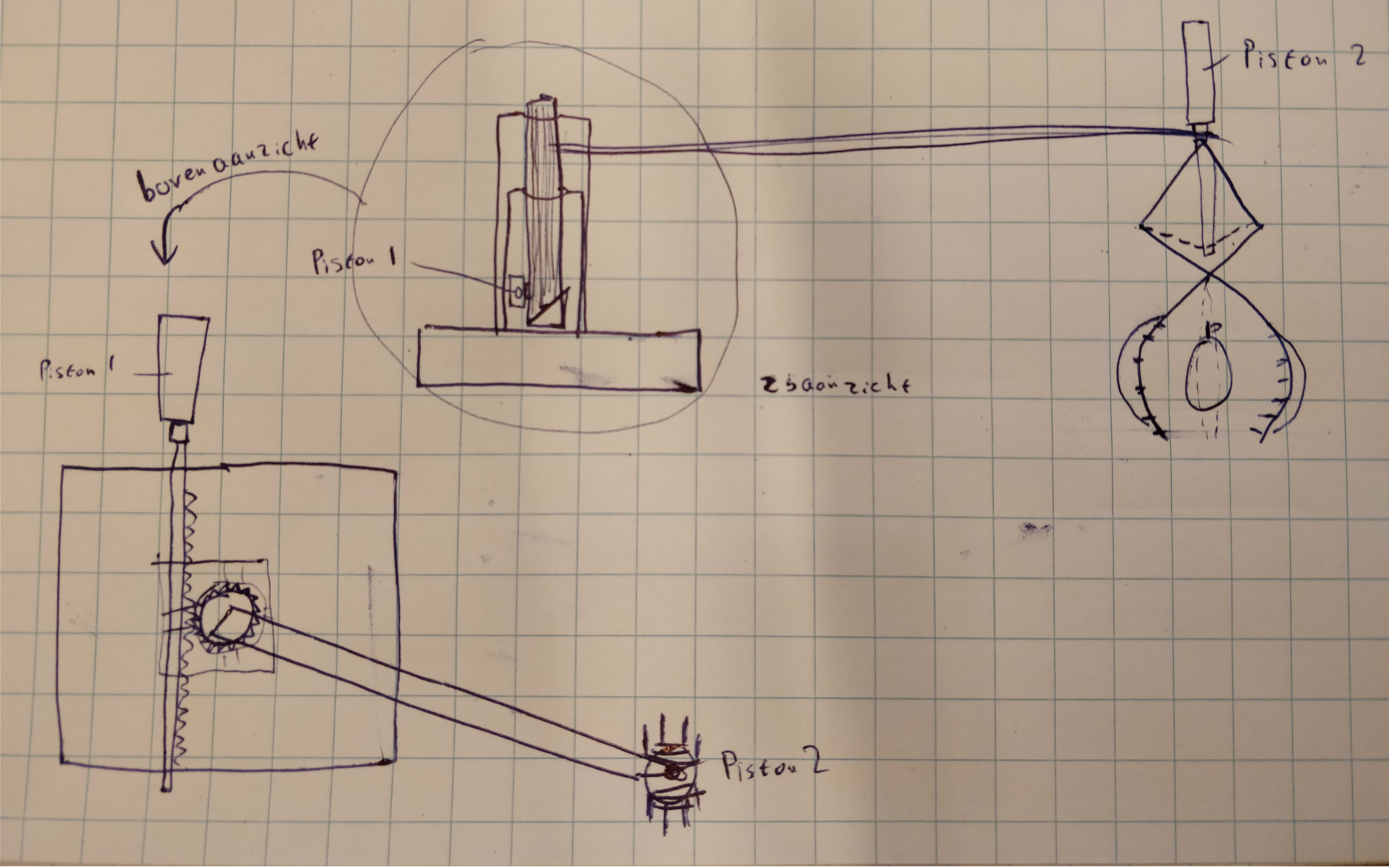
met één actuator haalbaar zijn. We kwamen snel tot de conclusie dat we de appel om het schort heen moesten
laten draaien. Zo hoefden we niet een extra actuator te gebruiken om de appel over het schort te verplaatsen.
Door middel van een tandwielen zouden we de horizontale beweging van het uitschuiven van de actuator kunnen
omzetten in een draai. Echter zouden we de arm tijdens de draai over een soort schuine balk moeten laten gaan,
die zorgt dat de arm 1,6cm hoger eindigt dan waar die begon. Dit komt doordat het eindstation van de appel
1,6 cm hoger ligt dan het begin station. Hierdoor moesten we het tandwiel waar aan de arm zit los maken,
zodat deze kon stijgen. Door middel van beugels zouden we hem op z’n plek moeten houden. Hierdoor kwamen
er steeds meer problemen voor de stevigheid en nauwkeurigheid, die opgelost moesten worden. Telkens als we een
oplossing vonden ontstond er weer een nieuw probleem. Uiteindelijk kwamen we tot de conclusie om deze niet te gebruiken.