WB-033
The (el)stars of WB
Uiteindelijk ontwerp
Onderdelen
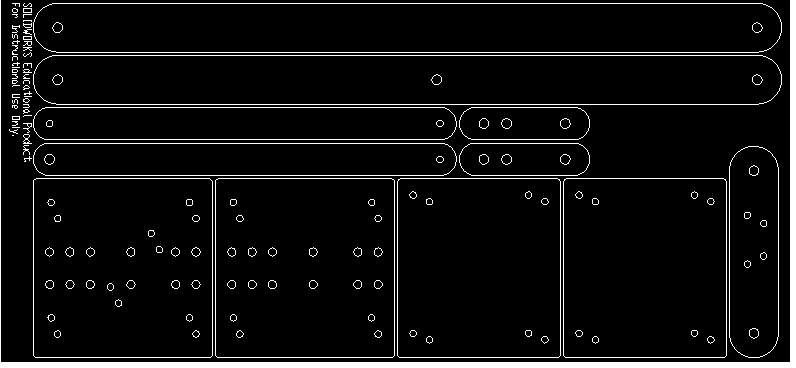
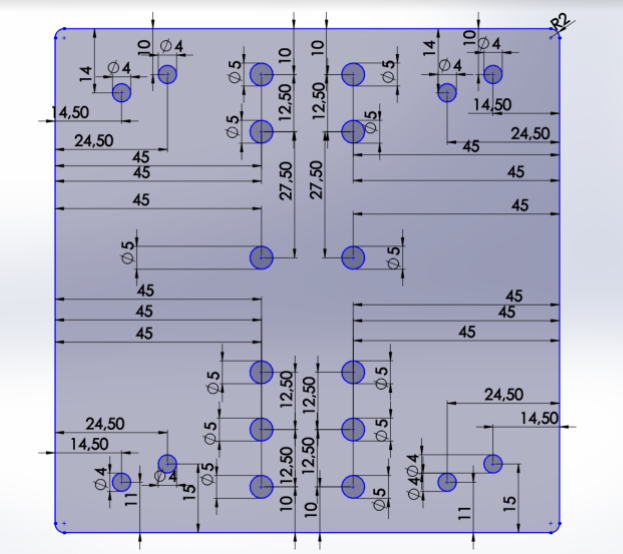
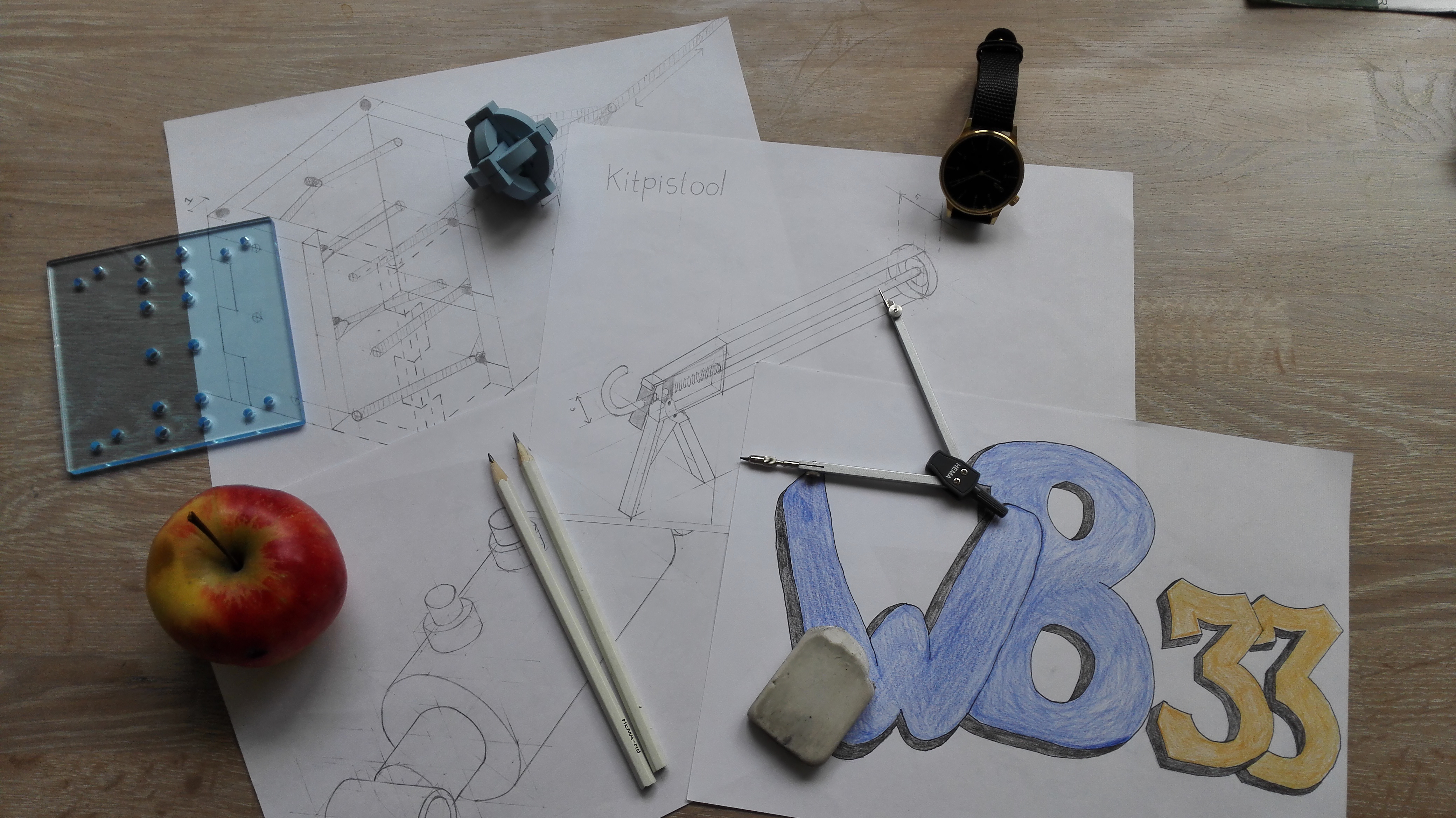
Grijper
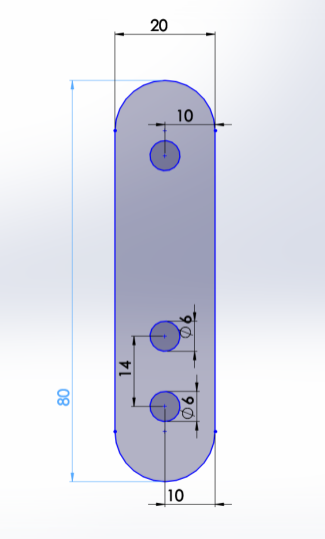
Het resultaat voor de grijper is dus zoals je kan zien op de foto een doosje van perspex geworden met daarin een een net van rubberen elastieken voor goede grip. Deze elastieken worden aangetrokken door een elastisch lint zodat er een bepaalde speling ontstaat bij het aantrekken van de rubberen elastieken door de actuator. Als je dit met touw zou doen dan heb je een grote kans dat de rubberen elastieken te strak worden aangetrokken en deze breken of te strak rond de appel komen te zitten. We hebben de kubusvorm gemaakt uit perspex plaatjes en deze hebben we aan elkaar bevestigd met hoekplaatjes. Hiervoor moesten natuurlijk gaatjes op de juiste plek zitten en dit hebben we uitgemeten en daarna in het lasersnij bestand gezet voor goede precisie. De gaten voor de elastieken hebben we over het vlak verdeeld maar wel met het idee dat er onder meer gaten moesten worden geplaatst om de appel goed te dragen. Maar ook moesten er gaten komen om het doosje fatsoenlijk aan de arm vast te kunnen maken en zo hebben we dus de gaten op elkaar afgesteld.
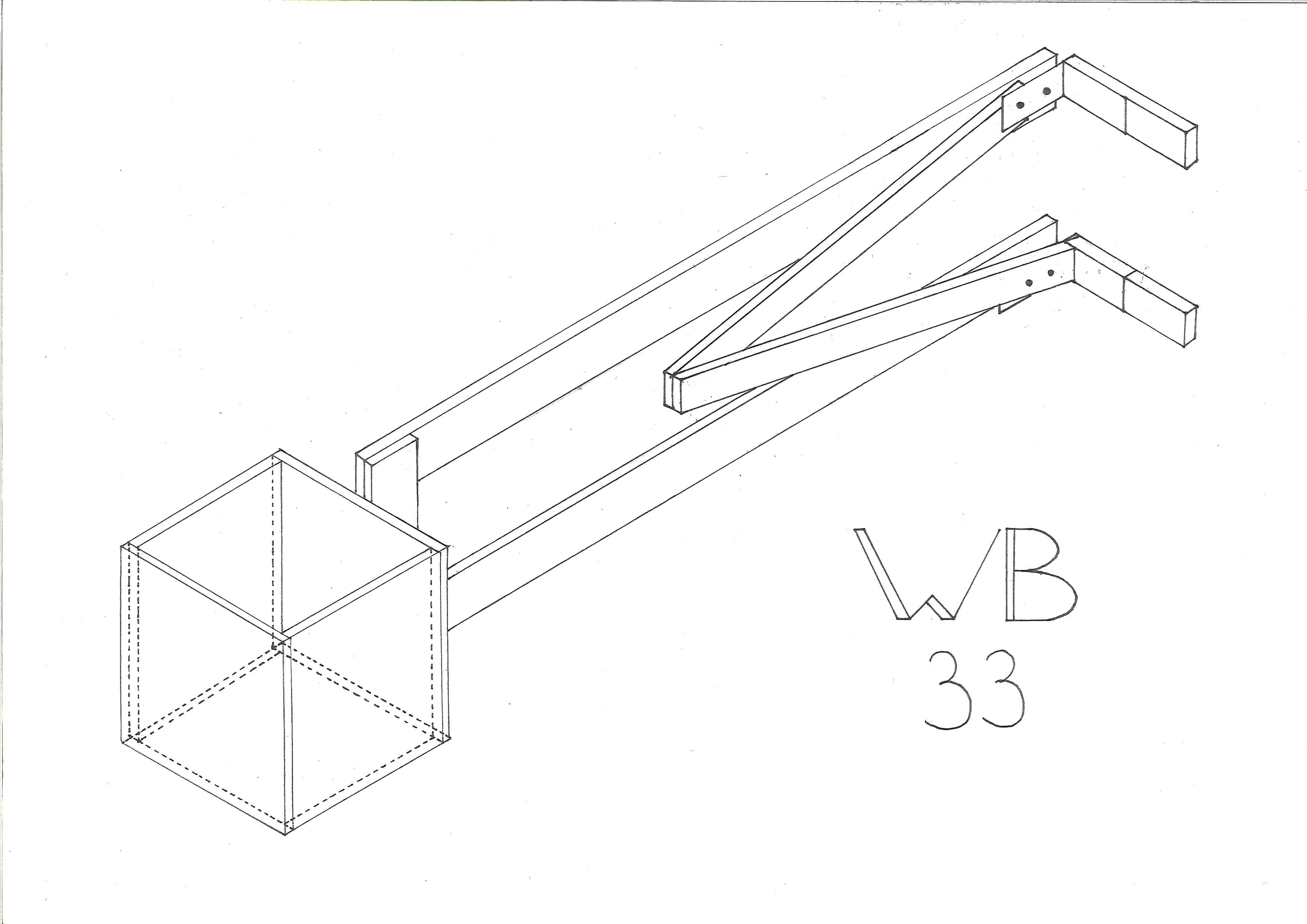
De arm
De arm was vrij snel duidelijk. Het 4-balkensysteem werkte erg goed in al onze testen met de concepten. De vraag was nu alleen nog hoe we dit systeem goed aan de grijper gingen bevestigen. Dit hebben we uiteindelijk gedaan met 2 hoekplaatjes in het midden van het plaatje van het doosje.
Verticale beweging
De arm wordt omhoog en naar beneden bewogen met een actuator die bevestigd is aan de onderkant van het 4-balkensysteem met een hoekplaatje aan de arm en met een hoekplaatje aan het bord. Zoals hier te zien is in het filmpje kunnen we dan de actuator aan het bord monteren en zo zorgen dat deze nie beweegt. Verder kunnen we nog aanpassingen maken in de hoogte door met behulp van tussenstukjes de lengte van de actuator te veranderen.
Horizontale beweging
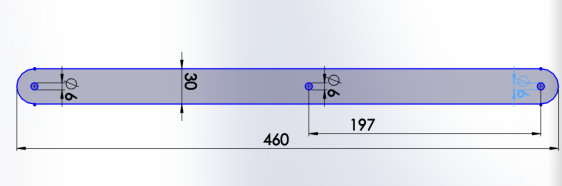
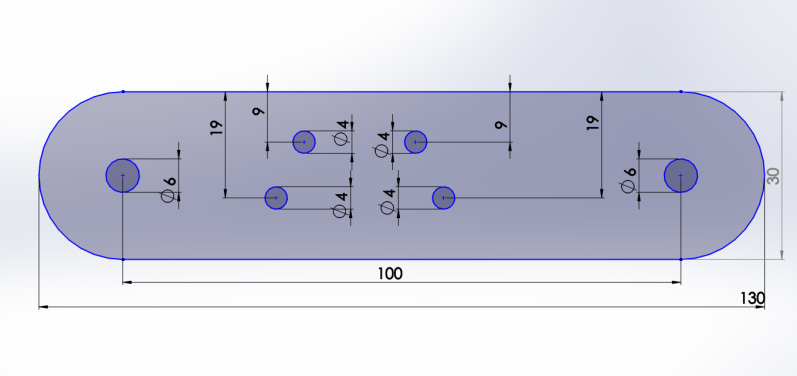
De arm wordt horizontaal bewogen door een actuator die de arm duwt door middel van het duwen van een niet verticaal bewegende driehoek die wel vastzit aan de scharnieren van het 4-balkensysteem. Het plaatje hier rechts is van belang om de scharnieren die aan de onderdelen zitten aan het bord te bevestigen.
Aantrekken elastieken
De elastieken worden vervolgens aangetrokken door de derde actuator die vastzit aan het bord in het midden van het 4-balkensysteem. Zo blijft de afstand van de actuator tot het doosje gelijk ook als deze omhoog en omlaag bewogen wordt. Zoals je kan zien in het filmpje hiernaast.