Gemaakte keuzes
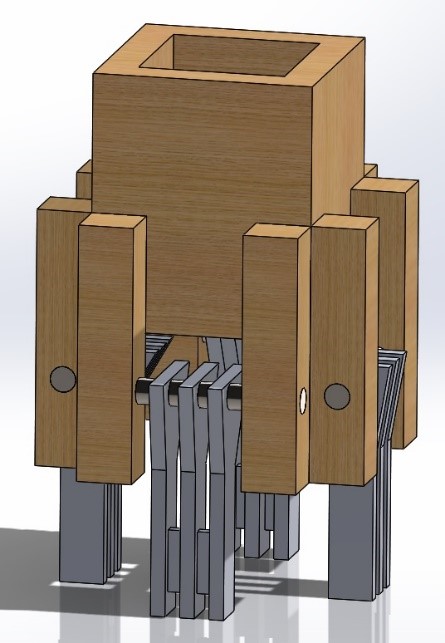
Wij hebben voor een bepaald soort grijper gekozen en hier leggen wij uit waarom wij voor deze constructie gekozen hebben. Onze grijper bestaat uit verschillende onderdelen dit zijn: het frame, de grijper, de hefboom en het schuif mechanisme. Wij leggen eerst uit waarvoor we voor dit frame gekozen hebben.
Frame
Wij hebben voor een groot houten frame gekozen met een aluminium rail op het houten frame. Wij
hebben voor een losstaand frame gekozen omdat wij graag iets anders wilden doen dan de andere
groepen en ook omdat het ons een goed en uitvoerbaar idee leek. Wij hebben ons idee deels
overgenomen van zo’n kermisgrijper machine waar je doormiddel van een control stick een grijper
kan verschuiven en met een druk op de knop van de control stick de grijper van de machine omlaag
kan bewegen waarmee je dan vervolgens een knuffel mee kan proberen te pakken. Wij vonden het
principe van zo’n machine interessant en het leek ons ook een niet super ingewikkelde klus om uit te
werken.
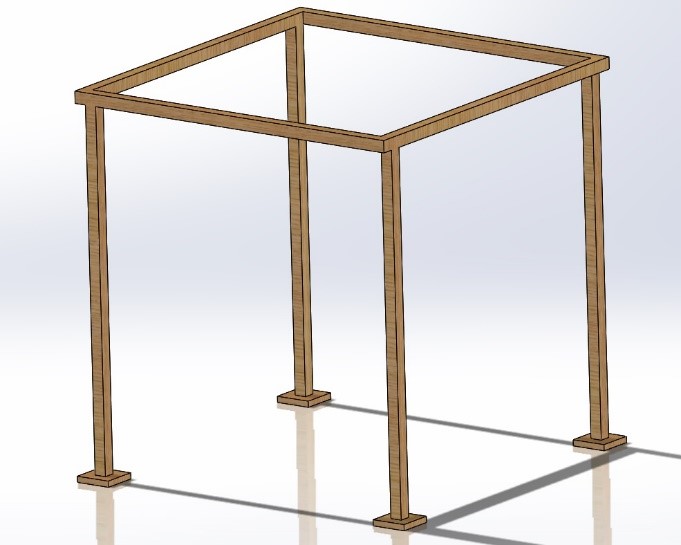
Wij hebben voor het materiaal van het frame hout gekozen omdat dit goedkoop was en ook stevig
genoeg om onze grijper te dragen. Verder zit het frame simpel in elkaar, we hebben een vierkante
bovenkant waar elke hoek wordt ondersteunt door een houten poot. Wij hebben hier wel een fout in
de berekening gemaakt aangezien de poten in onze huidige constructie asymmetrisch staan. Dit
komt doordat we tijdens het bedenken van het frame niet goed in gedachten hielden dat wanneer
we met spijkers de vierkante bovenkant monteren, we niet meer één poot in elke hoek kunnen slaan
doordat er door de hoek al een spijker heen loopt. Verder gaat dit niet ten koste van de stevigheid
van het frame.
Verder hebben we voor de rails op het houten frame voor aluminium gekozen. Dit hebben wij
gekozen vanwege zijn sterkte en dat wanneer er een houten schuif mechanisme over heen schuift
dat de rail voor zo min mogelijk wrijving zorgt en bij hout op hout is er toch sprake van teveel
schuifweerstand dus hebben wij gekozen voor aluminium. De rail moest van sterk materiaal zijn
aangezien hier veel gewicht aan moet hangen.
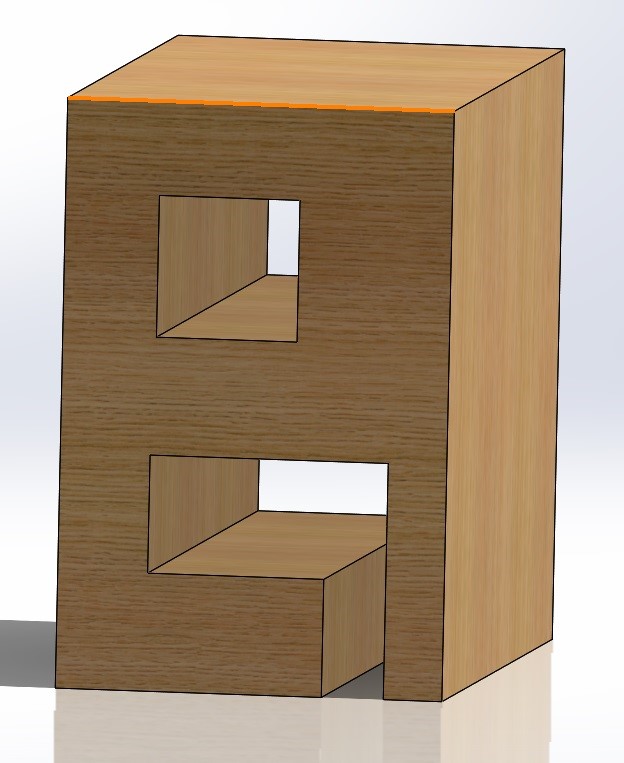
Schuifmechanisme
Het schuifmechanisme heeft als doel om zo makkelijk mogelijk over de rail heen te glijden en ook om de grijper te dragen. Het moet dus zo min mogelijk wrijving hebben op de rail en het moet sterk genoeg zijn om het gewicht van de grijper te dragen. Wij hebben ons schuifmechanisme van hout gemaakt. Als we wel voor metaal hadden gekozen zou dit zorgen voor een vervelend geluid wanneer metaal op aluminium moet glijden. Ook had ons schuifmechanisme een bijzondere vorm nodig. Wij hadden de mogelijk nodig om te kunnen bewerken want ons schuifmechanisme is niet zomaar verkrijgbaar in de winkel. Omdat aluminium veel moeilijker te bewerken is dan hout hebben wij voor hout gekozen. Ook zouden hierdoor de kosten oplopen en ook dit hadden wij staan in onze eisen: Het moet zo goedkoop mogelijk worden. Dit is dus de reden dat wij uiteindelijk toch voor hout gekozen hebben.
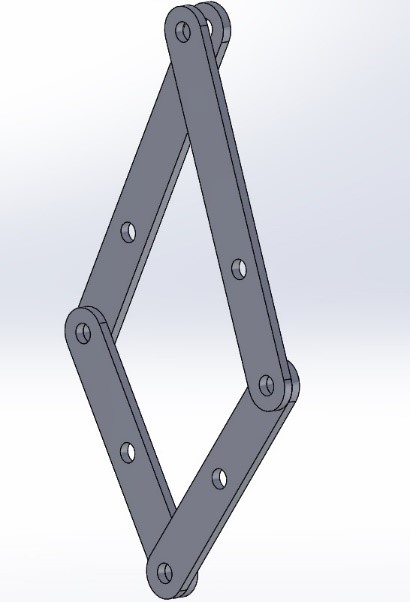
Nuremberg Scissors
Wij hebben om het voorwerp in verticale richting te kunnen verplaatsen naar het concept van een
hefboom gekeken. Een van de doelen van het project is om het voorwerp 15 cm in verticale richting
te kunnen verplaatsen. Het probleem is echter dat de actuatoren die we mochten gebruiken maar 10
cm kunnen uitschuiven wij moesten dus iets anders zien te bedenken waardoor we wel aan die 15
cm zouden komen. Wij kwamen dus op de gedachte van een hefboom. De hefboom bestaat uit 4
onderdelen twee korte metalen plaatjes en twee lange plaatjes. Op deze manier konden we door aan
een kant met de actuator een horizontale verplaatsing van 10 cm te geven een verticale verplaatsing
van 15 cm leveren.
In het begin wilde wij deze hefboom maken van plexiglas maar er zat een foutje in de berekening
waardoor we net niet op een verticale verplaatsing van 15 cm kwamen en uiteindelijk de hefboom
van metaal te hebben gemaakt waardoor dit wel kon.
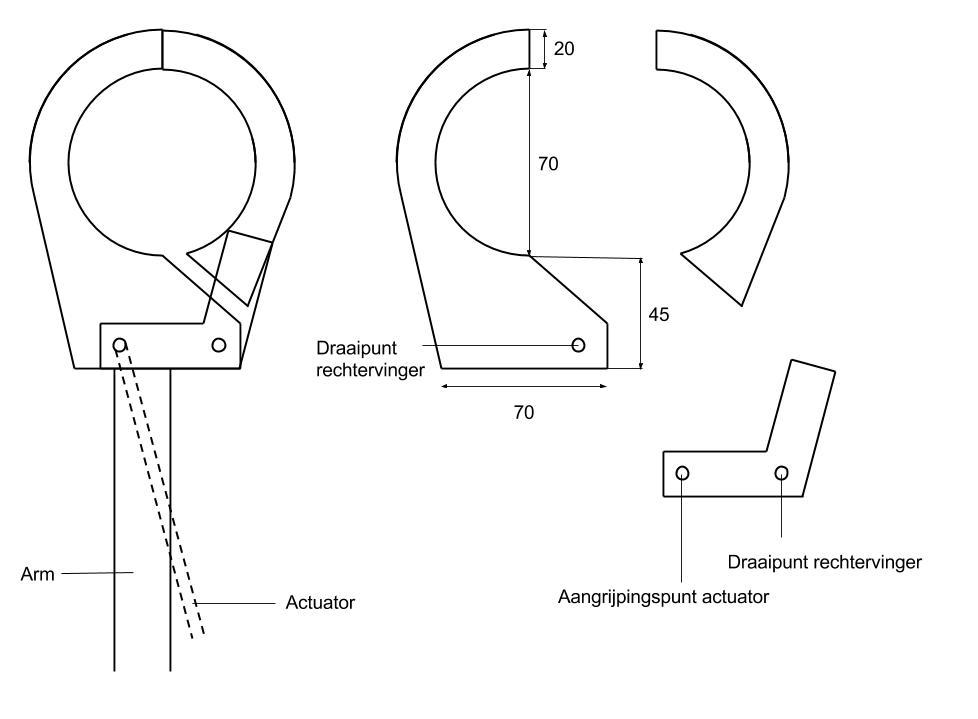
Grijper
Wij hebben voor een houten grijper gekozen met klauwen gemaakt van plexiglas. Aan de constructie van de grijper zit aan 4 kanten een klauw die bestaat weer uit 3 onderdelen van plexiglas. Deze vier klauwen staan wanneer de actuator in uitgeschoven stand staat open en in ingeschoven stand trekken de vier klauwen zich samen waardoor het voorwerp vastgepakt word. De klauwen worden omhoog gehouden door elastiekjes. Wij hebben voor klauwen gekozen die het voorwerp vast proberen te pakken met een platte kant in plaats van een punt zoals je bij roofvogels ziet. Dit leek ons het verstandigs aangezien nu het oppervlakte van aangrijping tussen het voorwerp en de klauw het grootst was. In de proef opstelling die wij van karton hebben gemaakt leek dit te werken maar achteraf in onze uiteindelijke grijper werkte dit niet naar behoren.