De evaluatie
Het lijkt nu alsof het ontwerpproces en de fabricage van onze grijper vlekkeloos is verlopen, maar dit is natuurlijk niet het geval geweest. We hebben voordat we gingen fabriceren dingen veranderd/verbeterd en erna. In dit stukje laten we zien wat we hebben aangepast aan de grijper t.o.v. ons eerste ontwerp, hoe we het hebben gedaan en waarom.
De grijper
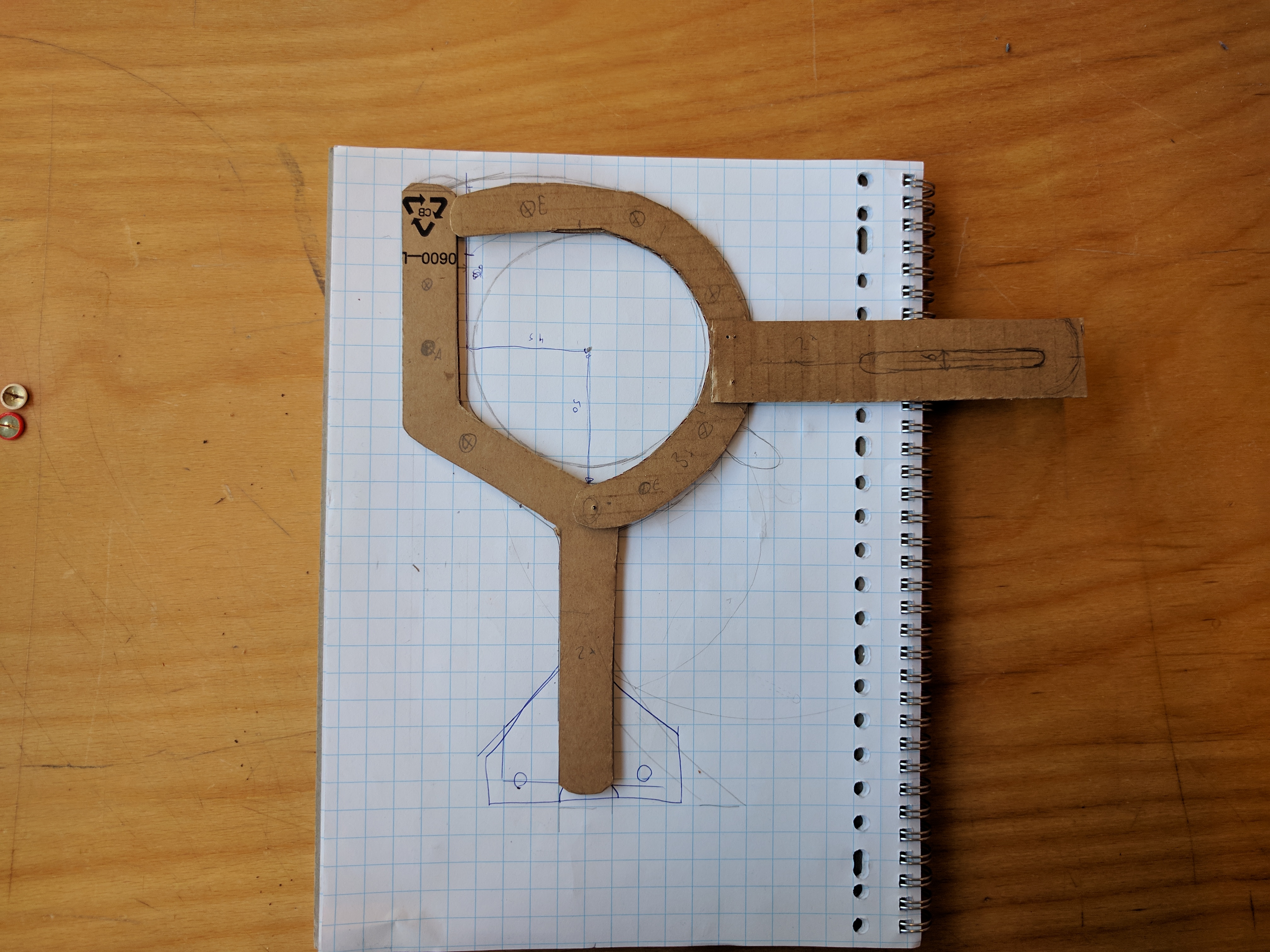
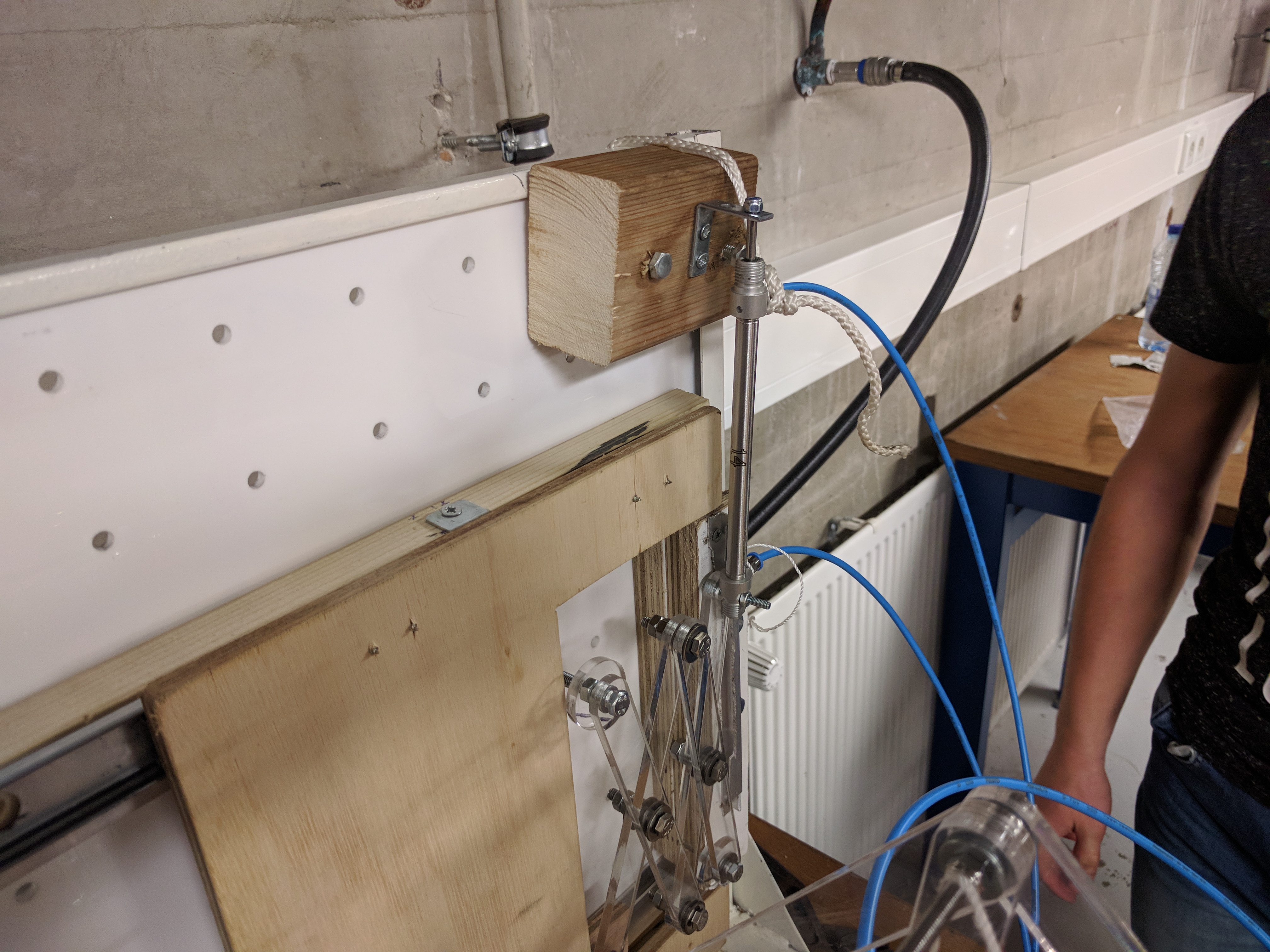
Het eerste probleem waar we mee te maken kregen was, zoals eerder op de site vertelt, de grijper. Dit probleem hebben we ontdekt voordat we gingen lasersnijden, dus konden de onderdelen gelukkig nog anders maken/ laten snijden. Zoals u hierboven in het spuugmodel(links) ziet, zit er aan de grijper rechts een gleuf waardoor de actuator zou kunnen bewegen. Alleen bij het opengaan van de grijper komt de zijkant van de gleuf tegen het muurtje aan en duwt hij er tegen aan. Dit is natuurlijk niet de bedoeling. We hebben dit probleem als volgt aangepakt. We hebben de gleuf minder haaks gezet op de grijper en aan de kant bevestigt die niet opengaat. Dit is ook te zien op de foto rechts. De gleuf steekt zo niet aan de zijkant uit en komt dus niet tegen het muurtje aan. Zo hebben we dit probleem dus kunnen voorkomen. Ten tweede kwamen na het fabriceren erachter dat de gleuf waarin de actuator beweegt, te dichtbij zat. De actuator heeft zelf al een lengte van 12cm in ingeschoven stand. In uitgeschoven stand is dit dus 22 cm. De actuator kon dus niet maximaal uitschuiven, waardoor we de grijper niet goed open en dicht konden doen. De oplossing die we hiervoor bedacht hebben is om met een houten blokje de gleuf op een verdere afstand te monteren (zie foto rechts). Zo kon de actuator maximaal uitschuiven en kon de grijper makkelijk open en dicht gaan.
De arm
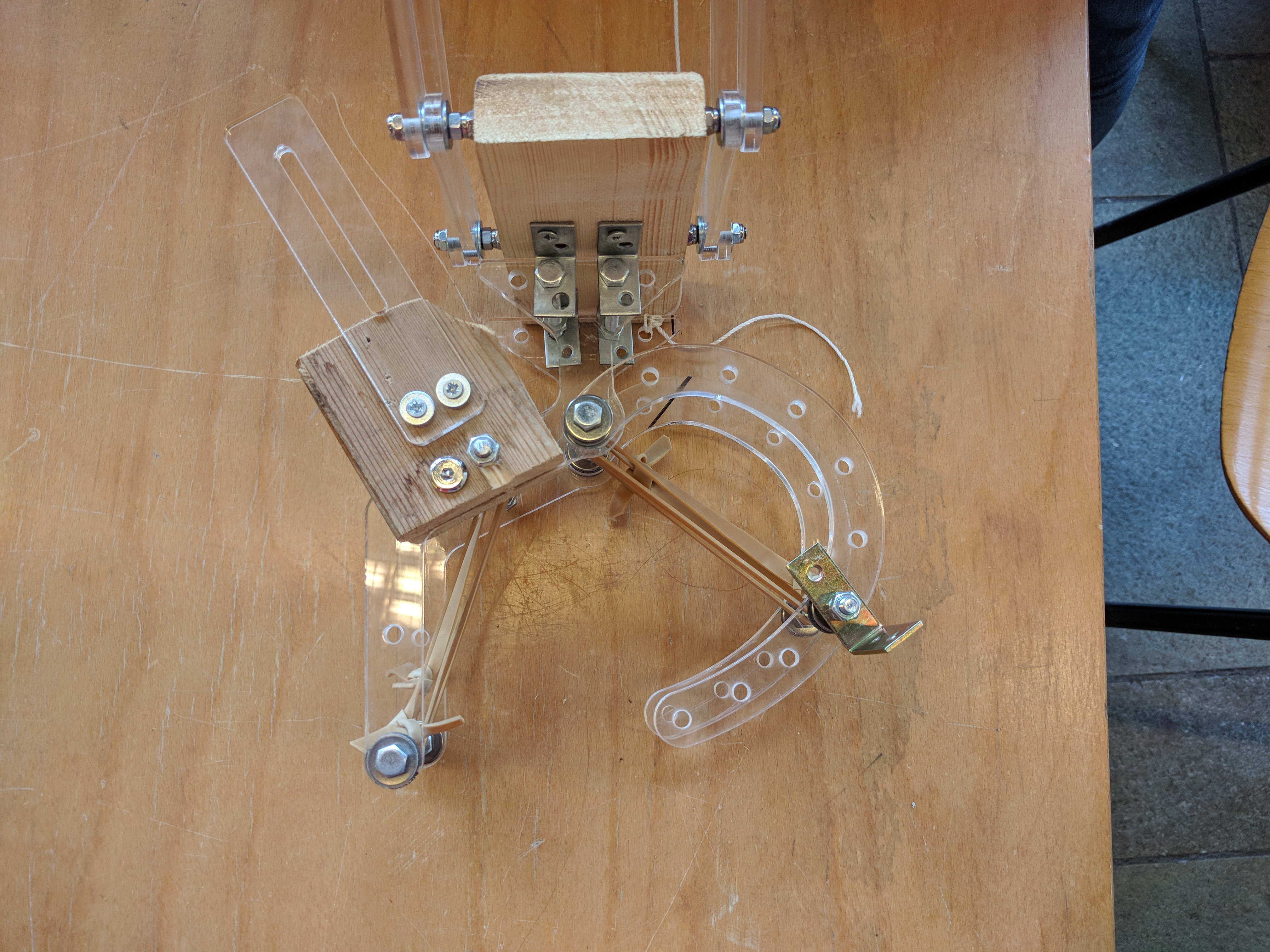
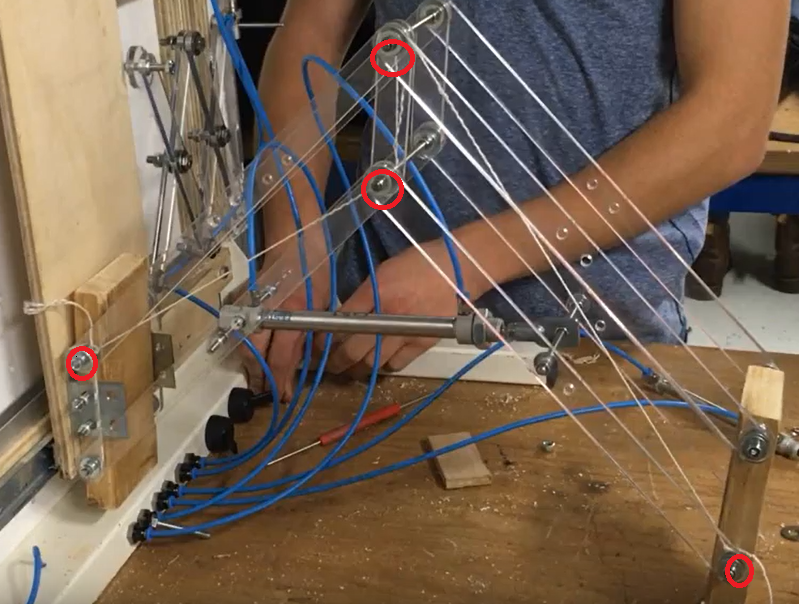
De arm heeft ook voor de nodige stress gezorgd in ons groepje. De arm was ontworpen zoals op de foto links te zien. We dachten dat de arm zo perfect ontworpen was en alles zou kunnen dragen. Hij zou in sharnierend vast worden gemaakt aan het plateau. Zo zou de arm kunnen in en uitklappen en toch niet op de grond belanden. Toen de arm in elkaar gezet was en vastgezet aan het plateau, bleek de arm naar beneden te vallen, omdat er geen ondersteuning was. Dit was de grootste tegenslag in ons project. We hebben er hard aan gewerkt om dit werkend te krijgen en zijn op het idee gekomen om touw tussen de arm door te spannen.Zo zou de arm de grond niet meer raken en stevig vastzitten aan het plateau. De manier hoe het touw vastgemaakt is, is te zie op de rechterfoto. De punten waar het touw omheen zit, zijn rood gemaakt.

Het schaarsysteem
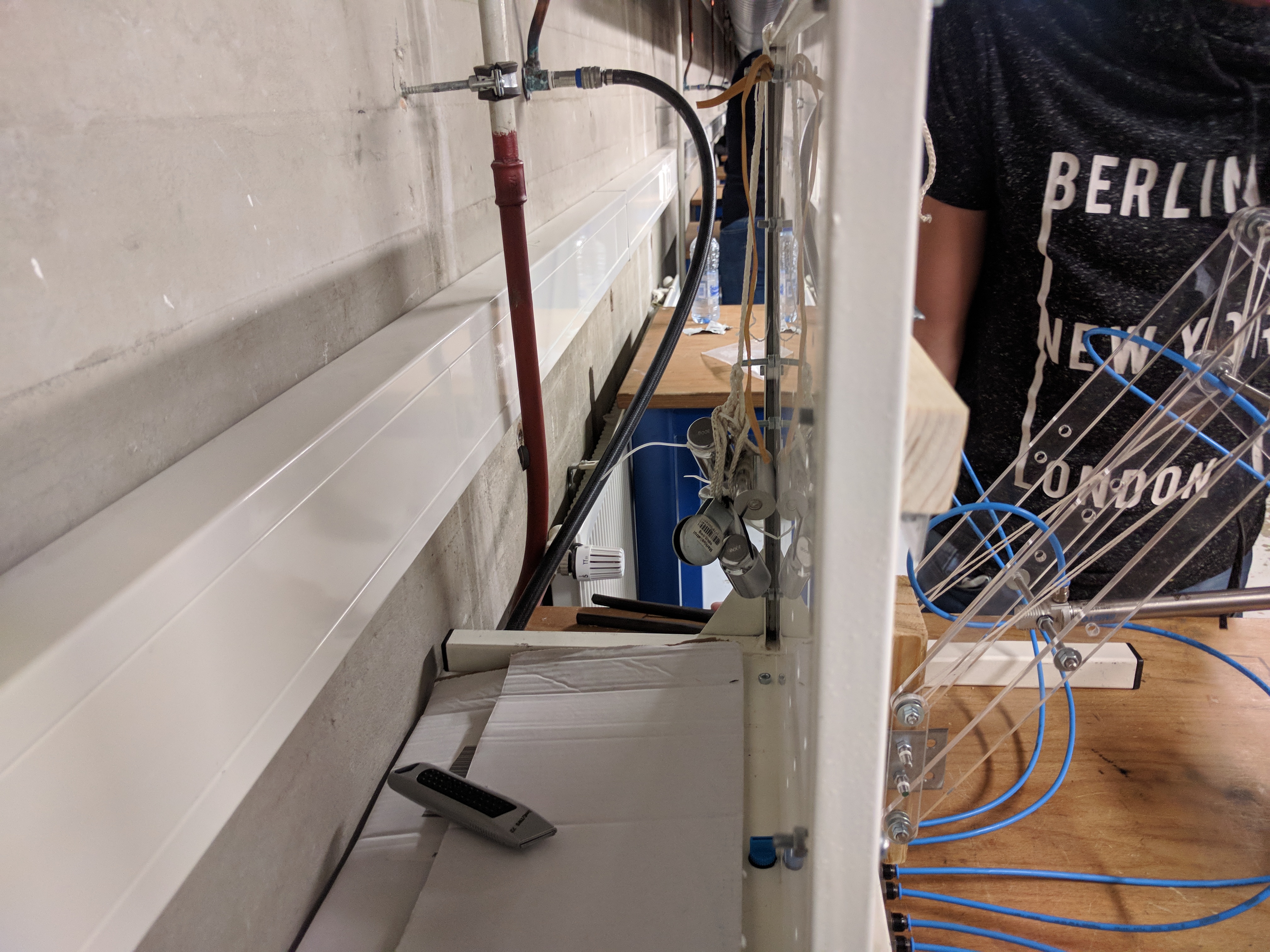
Het schaarsysteem hebben we de minste problemen mee gehad. De afstand die afgelegt moest worden met behulp van het schaarsysteem was van te voren uitgerekend. Dit bleek echter behoorlijk lastig te zijn. Uiteindelijk hebben we de juiste lengte en plaatsing van de scharen berekend door middel van een model in Solidworks, waardoor de werkelijke constructie goed werkte. Ook het bevesigen aan het bord ging zoals gepland. Het enige dat we verkeerd ingeschat hadden, is dat er een behoorlijk gewicht aan de rails kwam te hangen. Hierdoor werd de verticale verplaatsing een stuk moeilijker en werd nog maar de helft van de horizontale afstand gehaald! Zo haalden we het dus niet om de appel voorbij het muurtje te krijgen. We hebben dit probleem gelukkig ook opgelost. Door middel van een contragewicht te bevestigen aan de actuator en deze aan de andere kant van het bord te hangen kon het gewicht aar beneden gecompenseerd worden en werd de wrijvingskracht een stk minder. Hierdoor hebben we nu wel de gewenste afstand kunnen halen. Op de linkerfoto is te zien hoe de gewichten aan de achterkant van het bord vastzitten. Ze zitten vast aan een touw die aan de andere kant van het bord vastzit aan de actuator(ter hoogte van het houten blokje). Dit is te zien op de rechter foto.
Wat ging er wel in een keer goed?
Natuurlijk hebben we veel moeten aanpassen, maar over het algemeen is er best veel goed bedacht en berekend. De arm en de grijper hebben het gewicht bijvoorbeeld allemaal kunnen houden. Ze zijn niet doorgebroken. De bevestigingen van de grijper aan de arm, en het plateau aan de rails is in een keer goed gegaan. Ook kon de grijper de appel makkelijk vastpakken en loslaten, met verschillende groottes. Dit kwam door de elastieken die voor veel grip zorgden. Verder is de rails voor het schaarsysteem goed ontworpen. Dit zorgde ervoor dat het schaarsysteem soepel kon bewegen, zonder 'uit de baan' te schieten. Al met al hebben we het naar onze mening goed gedaan en hebben we een degelijke oplossing verzonnen die goed zijn werk doet. We zijn trots op het resultaat en hoe iedereen zich ingezet heeft voor het project!