Evaluatie
Uiteindelijk deed onze grijper het, maar alleen als de druk niet al te snel opbouwde. De enige manier om hem te bedienen was dus door de knoppen rustig over te halen. Het muurtje is in onderstaande video weggelaten omdat onze grijper deze raakte, daarover wordt verder meer verteld.
Hoewel het algehele principe van de grijper dus wel werkte, waren er een aantal punten waardoor het niet volledig
aan de opdracht voldeed. We zullen het ontwerp evalueren aan de hand van het programma van eisen en wensen.
De groene doelstellingen uit het programma van eisen en wensen zijn gehaald. De rode doelstellingen zijn niet gehaald.
Hieronder zullen we de niet-behaalde doelstellingen bespreken.
Plan van Eisen en Wensen |
|
|---|---|
| Eisen | Wensen |
| Het systeem mag van maximaal 3 pneumatische actuatoren gebruik maken | 2 ipv 3 actuatoren |
| Het systeem mag de appel niet beschadigen | Gekoppeld aan montageframe (en dus onkoppelbaar). |
| In de beginstand mag geen enkel deel van het mechanisme zich in de ruimte boven het vierkant naast het plateau bevinden. Het systeem moet zich dus naar de appel toe bewegen | De appel midden in de roos terugzetten (130mm van de twee zijden) |
| In de eindstand mag geen enkel deel van het mechanisme zich in de ruimte boven het plateau bevinden. | Alleen toegeleverde materialen van de TU gebruiken. |
| Appel moet rechtop opgepakt worden en ook zo weer neergezet worden. | Het model is op te bergen in een grijs kluisje |
| Het systeem moet de appel op het plateau aan de andere kant zetten | Simpliciteit, (dus produceerbaarheid) |
| Het systeem is binnen 5 minuten neer te zetten en gebruiksklaar te maken | |
| Er mogen geen mensen en dingen beschadigd raken tijdens de assemblage en het bedienen van het systeem | |
| Moet zich in 30 seconden naar andere kant van plaat bewegen. | |
| In het ontwerp mogen geen elektromotoren zitten | |
Niet gehaalde eisen:
- In de eindstand mag geen enkel deel van het mechanisme zich in de ruimte boven het plateau bevinden.
- Het systeem moet de appel op het plateau aan de andere kant zetten.
In de beginstand bevindt de grijper zich aan de andere kant van het plateau. Als de grijper opent om de appel te pakken duwt deze tegen de testopstelling aan. Hierdoor kan de opdracht niet verder uitgevoerd worden dus de appel komt niet aan de andere kant van het plateau en de grijper komt nooit in de eindstand.
- Er mogen geen mensen en dingen beschadigd raken tijdens de assemblage en het bedienen van het systeem.
Tijdens het ontwerpen en monteren is gelukkig niemand verwond en is er niks kapot gegaan. Tijdens het testen echter trok de kracht van de actuatoren de grijper uit elkaar.
- Moet zich in 30 seconden naar andere kant van plaat bewegen.
De grijper ging kapot voordat deze aan de andere kant van de plaat kon komen, en de keer dat hij wel werkte hielden we ons niet aan de voorwaarden. Deze eis is dus niet gehaald.
Niet gehaalde wensen:
- 2 ipv 3 actuatoren.
De grijper was ontworpen met 3 actuatoren. Deze wens is dus niet gehaald.
- De appel midden in de roos terugzetten (130mm van de twee zijden).
De appel kwam überhaupt niet aan de andere kant van het plateau, dus zeker niet midden in de roos.
- Alleen toegeleverde materialen van de TU gebruiken.
Tijdens het ontwerpen bleek al snel dat er niet genoeg PMMA gebruikt mocht worden om de hele hele grijper uit te maken, dus werd er voor een aluminium buis gekozen voor de arm. Daarnaast waren er geen bouten beschikbaar vanuit de TU. Daar waren we tijdens het ontwerpen wel vanuit gegaan.
Verbeterpunten
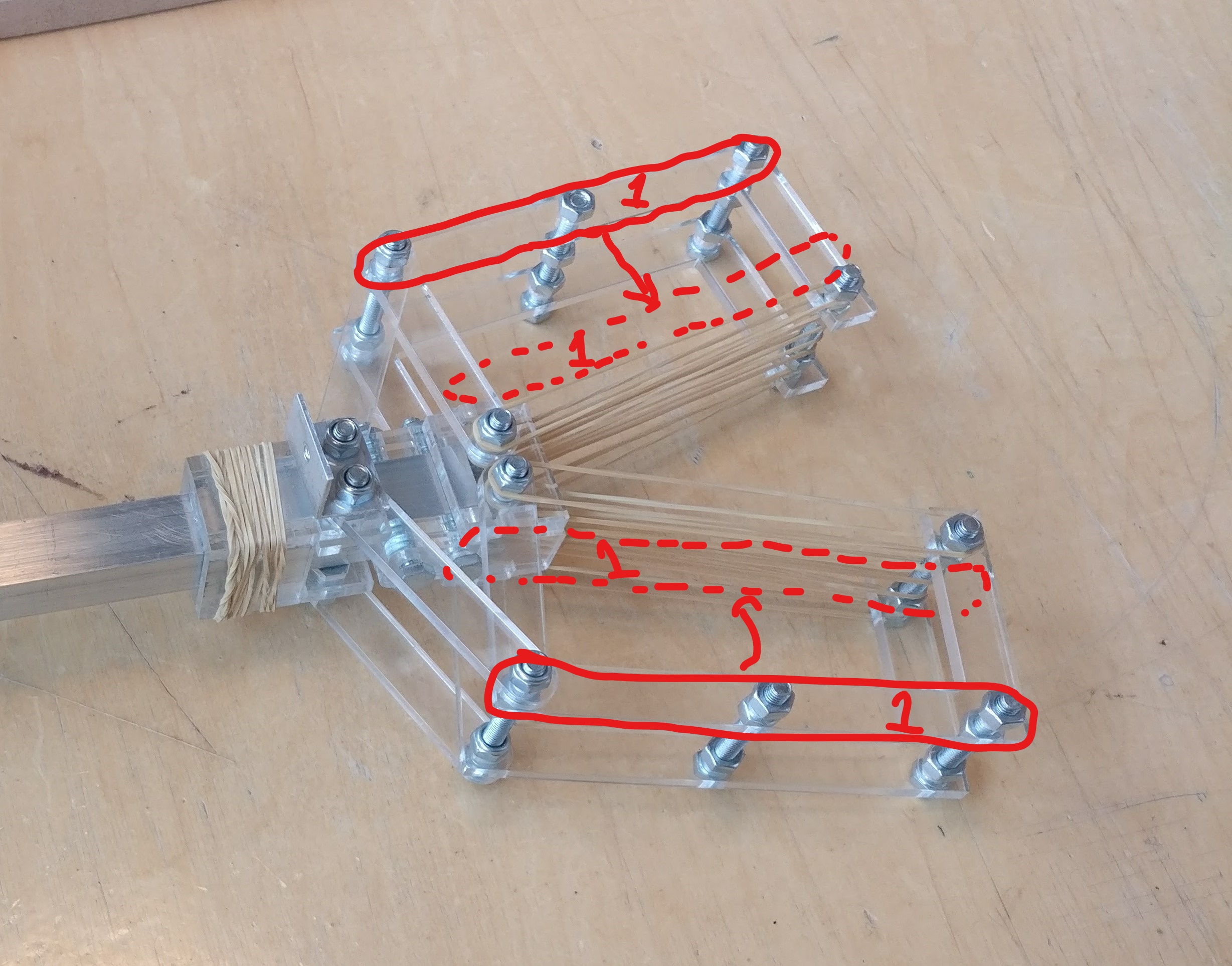
Grijper verkleinen
Probleem:
Doordat het frame van de grijper erg groot is (160x140x50mm) en de grijper volledig openklapt,
neemt deze zeer veel ruimte in. De appel ligt in ideale situatie slechts 130mm van het muurtje, wat niet haalbaar
bleek te zijn voor onze grijper. Als deze namelijk open klapte, stootte hij tegen het muurtje aan.
Het probleem in ons proces dat ervoor zorgde dat dit probleem kon ontstaan, was dat er in het ontwerp niet
goed genoeg na was gedacht over de verschillende standen van de grijper. Hoewel er in de berekeningen rekening
was gehouden met de bewegingsruimte van de grijper in gesloten stand, was dit niet het geval voor de opengeklapte
toestand van de grijper.
Oplossing:
Niet helemaal openklappen of frame compacter maken. We hadden dit bijvoorbeeld kunnen doen
door een blokkering te maken op de arm. Denk dan aan een beugel die op de arm bevestigd zit waardoor de grijper
niet meer tegen het muurtje aanstoot. Ook hadden de twee "vingers" van de grijper dichter op elkaar kunnen zitten
met dezelfde functionaliteit.
 |
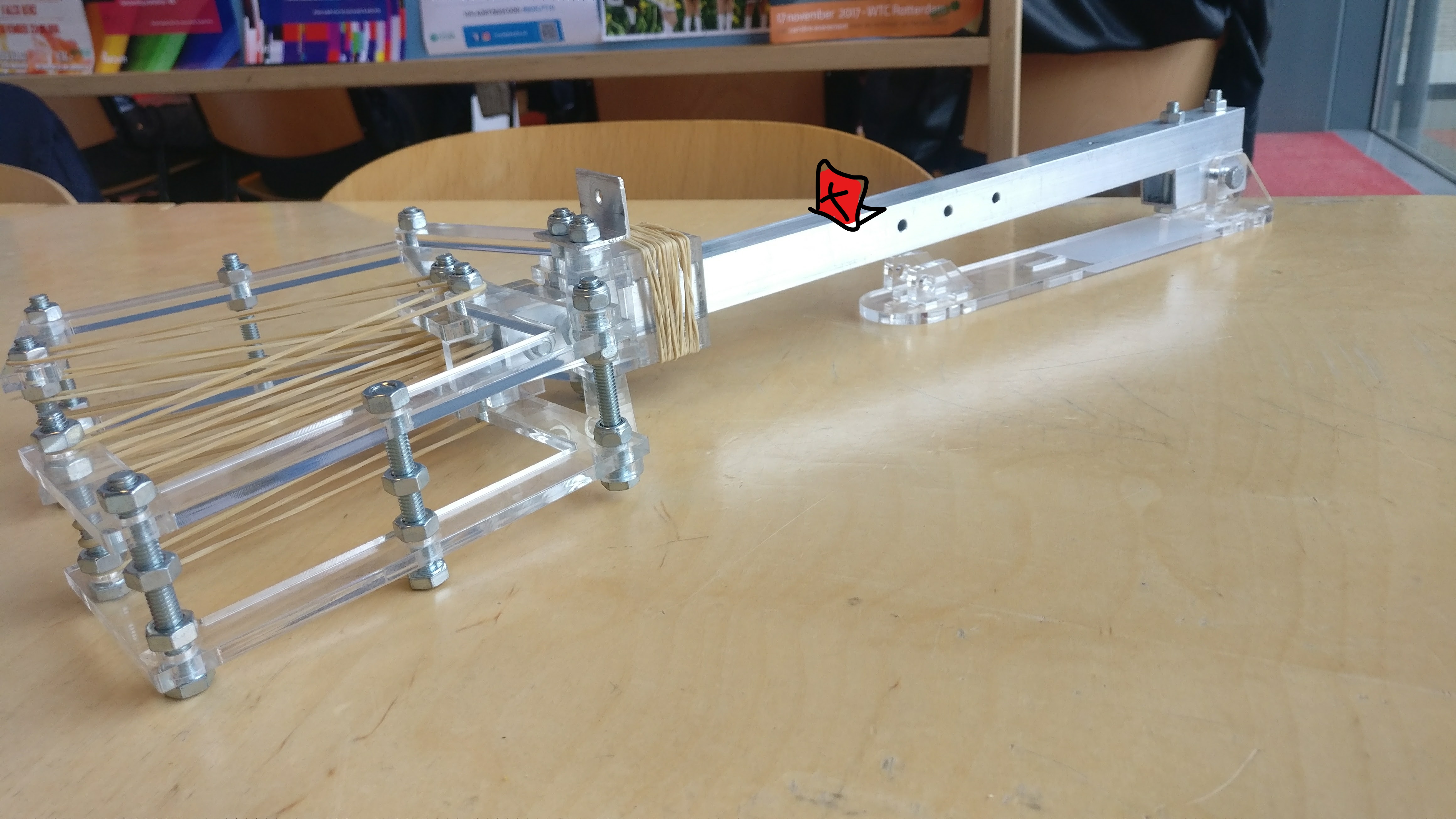 |
Zorgen dat door de verticale beweging de arm niet uit de basis vliegt
|
Probleem: |
Oplossing:
Een contragewicht op het punt waar de arm aan de basis bevestigd is. Hierdoor creëren we een neerwaartse kracht
die de opwaartse kracht kan compenseren die door de actuator gecreëerd wordt als deze de arm omhoog trekt.
Een andere oplossing is de actuator aan de basis bevestigen, zoals met ons herontwerp het geval was. Hierdoor
is het te beschouwen als interne krachten binnen de basis waardoor deze elkaar al automatisch compenseren.
Zorgen dat door de zijwaartse beweging de arm niet uit de basis vliegt
|
Probleem: |

|
Oplossing:
Dit probleem kan opgelost worden door het scharnierpunt aan de basis te lijmen.
Daarnaast kan door dit scharnierpunt zwaarder uit te voeren de stabiliteit van de arm verbeterd worden.
Groepsdynamiek
De sfeer in de groep was meestal goed, maar op sommige momenten kon de efficiëntie en taakverdeling verbeterd worden.
Tijdens het naderen van de deadline van het inleveren van het DFX bestand dat laser gesneden moest worden sloeg bijvoorbeeld de stress
lichtelijk toe. De reden hiervoor was dat de werklast op dit moment niet optimaal verdeeld waren. Veel van de werklast werd hier
namelijk gedragen door Rik, die het beste om kon gaan met SolidWorks en dus logischerwijs hierin alle tekeningen maakte. Op zichzelf
was dit geen groot probleem, wat er echter mis ging was dat hij behalve het tekenen ook het ontwerpen zelf deed. Na een bespreking
met de projectdocent en een evaluatie met de groep over de werkwijze hebben we echter ervoor gezorgd dat alles behalve het tekenen
zelf, door de rest van de groep werd gedaan.
Een andere kleine opstopping in het groepswerken was het in- en uitvallen van teamleden.
Want hoewel de eerste afvaller (Russel) na een paar dagen was vervangen door iemand die was overgestapt (Timo), kwam deze vervanger
na een week niet meer opdagen. Pas twee weken hierna hoorde we echter dat hij ook was afgevallen.
Verder waren er geen specifieke bijzonderheden en liep de samenwerking goed.