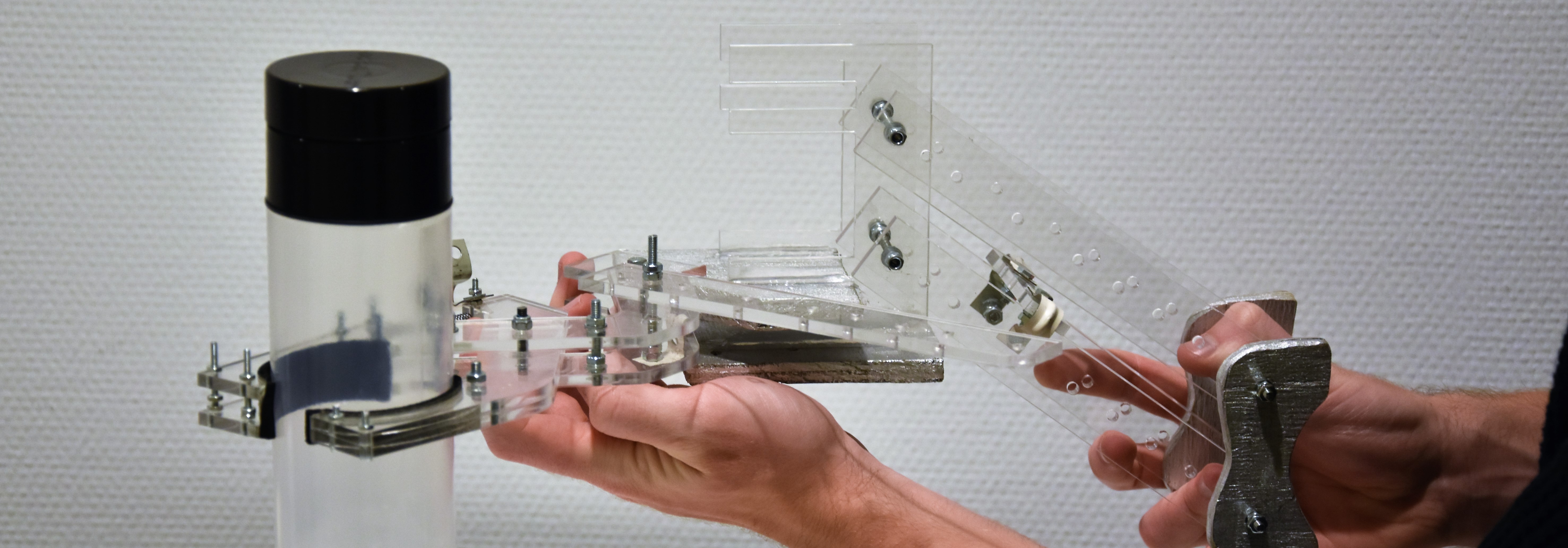
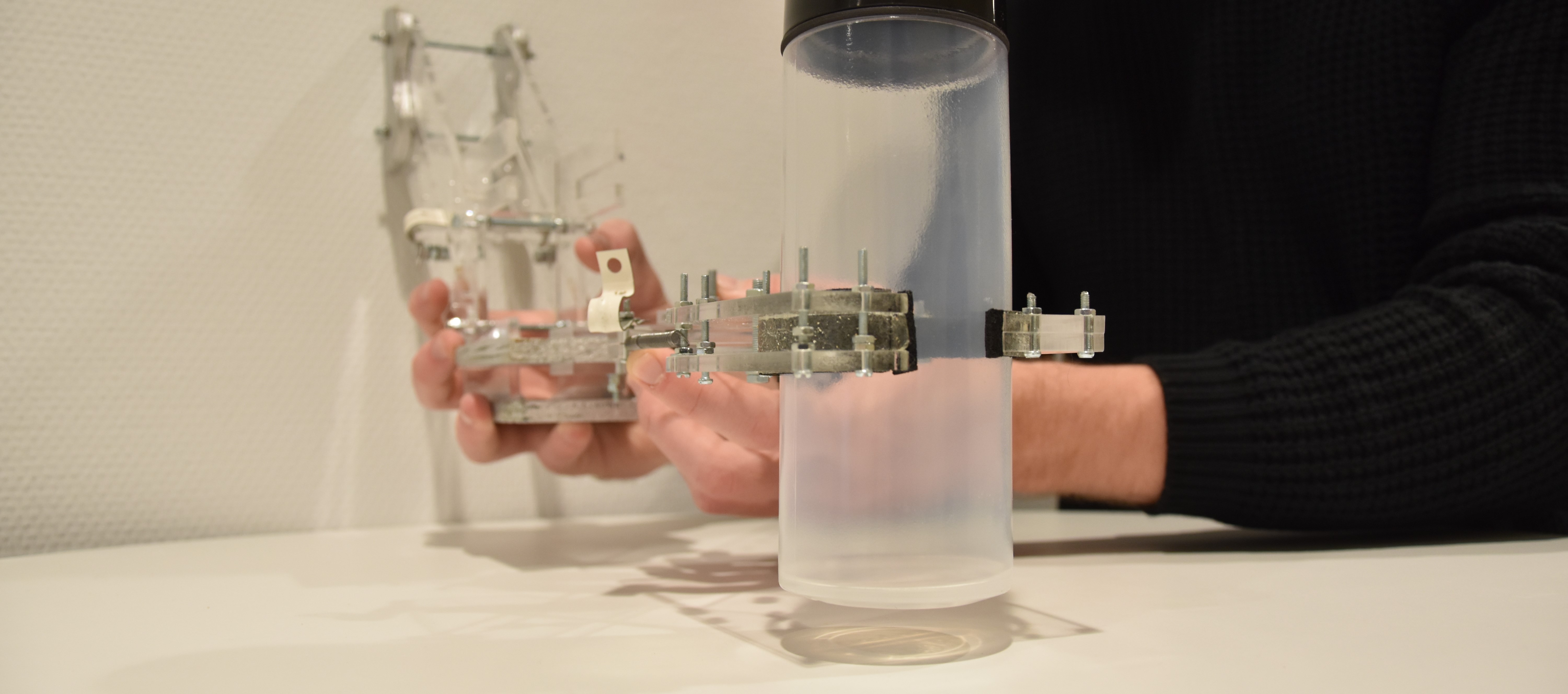
Werking van de grijper
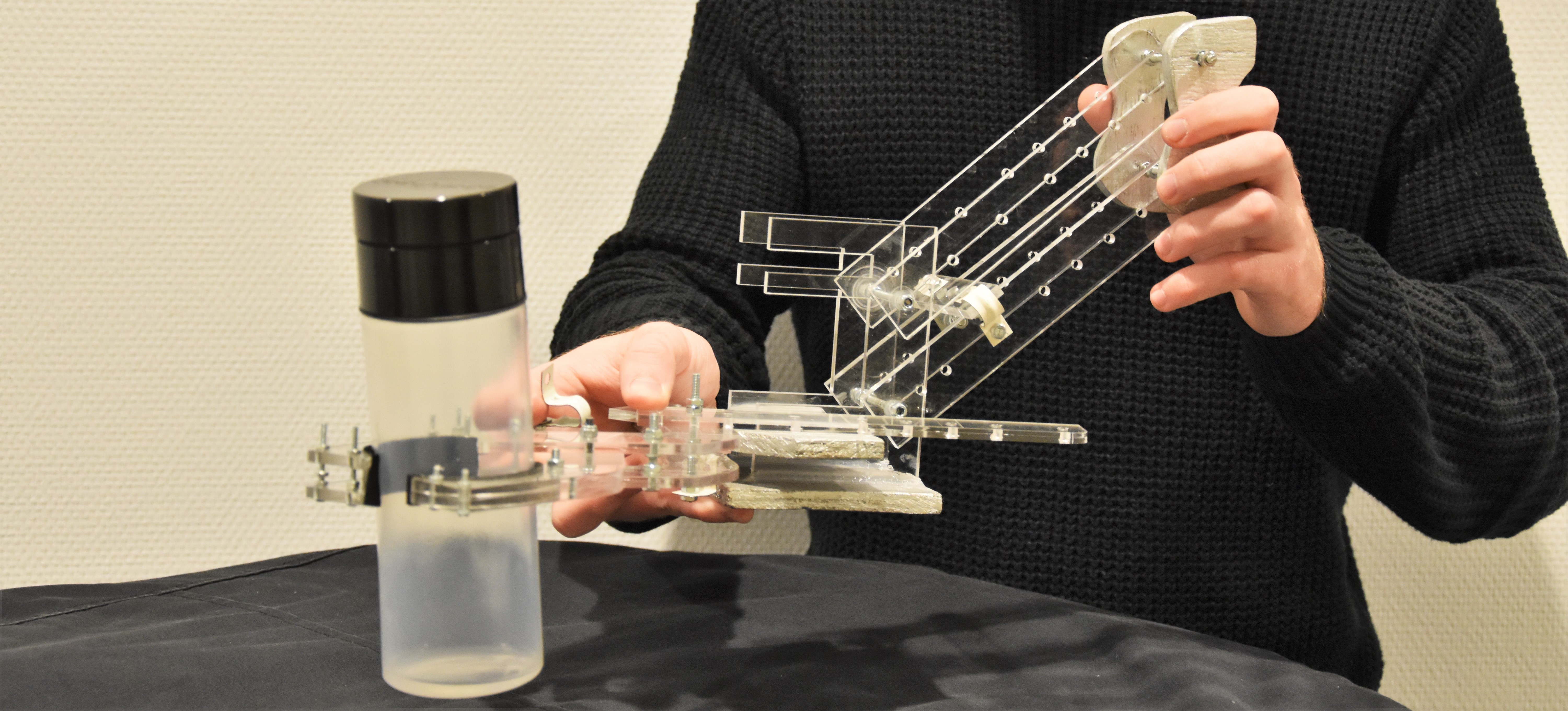
De grijper bestaat uit twee armen: de tweede arm is tussen de twee perspex platen van de eerste arm verbonden met een pin zodanig dat de tweede arm ten opzichte van de eerste arm kan draaien. De eerste arm bestaat uit een recht deel na de pin en is verbonden aan de rest van het systeem. De tweede arm bestaat uit een kort recht deel waaraan de piston van de pneumatische actuator verbonden wordt zodanig dat de actuator een kracht van de eerste arm op de tweede arm kan uitoefenen dat er een draaimoment ontstaat en de grijper afhankelijk van de richting van de kracht open of dicht gaat. Om het de draaibeweging van de tweede arm te kunnen volgen dient de actuator met een scharnier die over de eerste arm kan draaien bevestigd te worden. Tussen de eerste arm en de vinger van de tweede arm is een trekveer bevestigd. Deze veer heeft als functie de kracht van de dichtgaande beweging tegen te werken voor een meer gecontroleerde grijpbeweging.
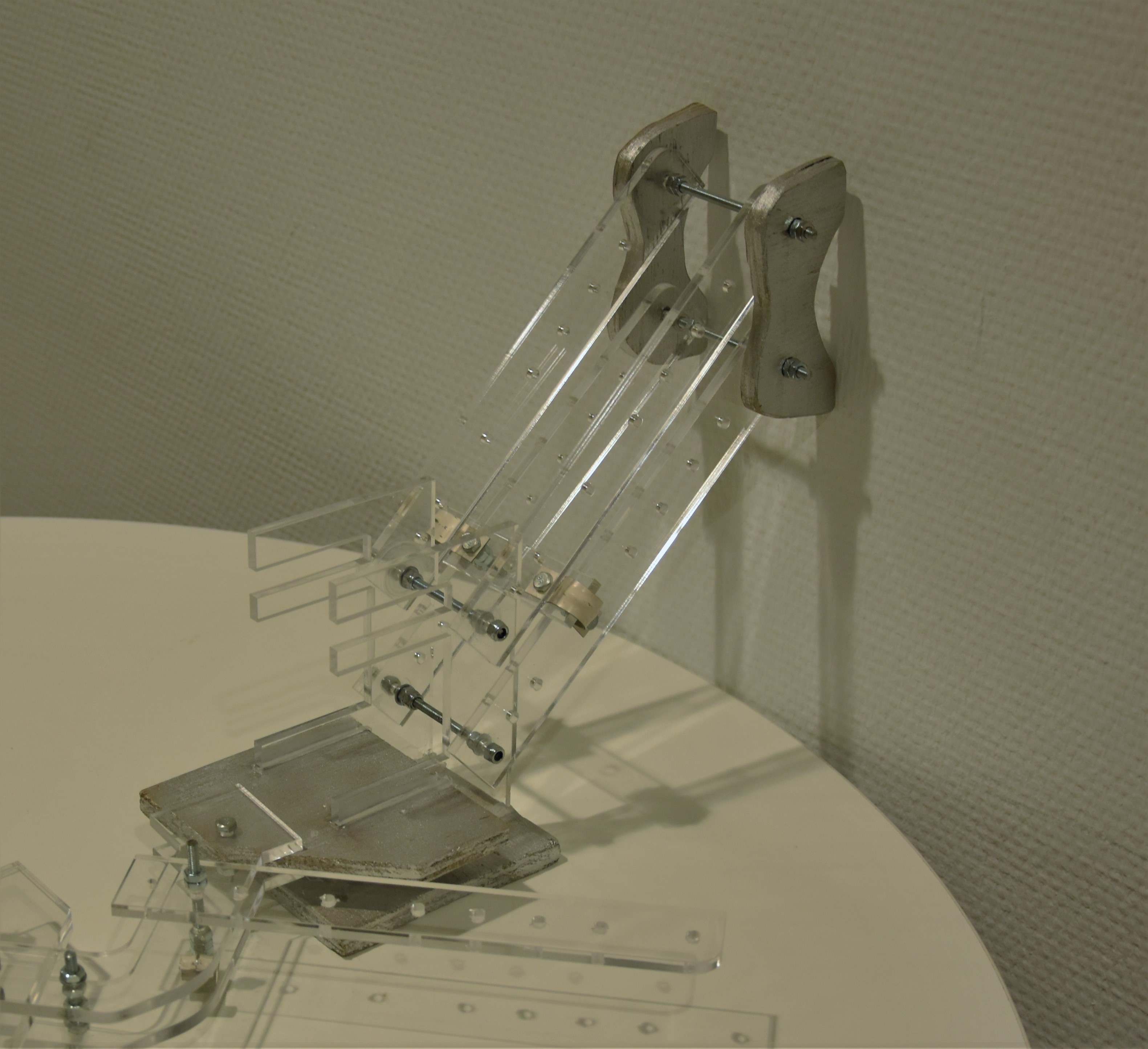
Verticale beweging
Het deelsysteem dat verbonden is aan de grijper en verantwoordelijk is voor de verticale beweging bestaat uit twee boven elkaar geplaatste rechte armen die aan de uiteinden met pinnen loodrecht boven elkaar bevestigd zijn. De uiteinden aan de kant van de grijper zijn verbonden aan twee verticale platen die de twee rechte armen onderling verbinden en door middel van een kam van twee tanden aan de onderkant een verbinding met de houten horizontale plaat (dat deel is van de horizontale beweging) mogelijk maakt. De uiteinden aan de kant van de muur zijn aan elkaar verbonden aan twee houten verticale verbindingsstukken die vervolgens aan de muur bevestigd zijn. Deze onderlinge verbinding van de twee boven elkaar geplaatste rechte armen zorgt ervoor dat bij de verticale beweging de verticale platen en dus de grijper horizontaal ten opzichte van het oppervlak blijft. Dit is gewenst omdat nadat de beker omhoog bewogen is de grijper de beker weer horizontaal ten opzichte van het oppervlak geplaatst dient te worden. De actuator die zorgt voor de verticale beweging is tussen de onderste twee armen en met een scharnier aan de muur verbonden. Uiteraard is de actuator zodanig verbonden aan de twee bevestigingspunten dat het mee kan bewegen zodat het draaien van de armen zo min mogelijk belemmerd wordt.
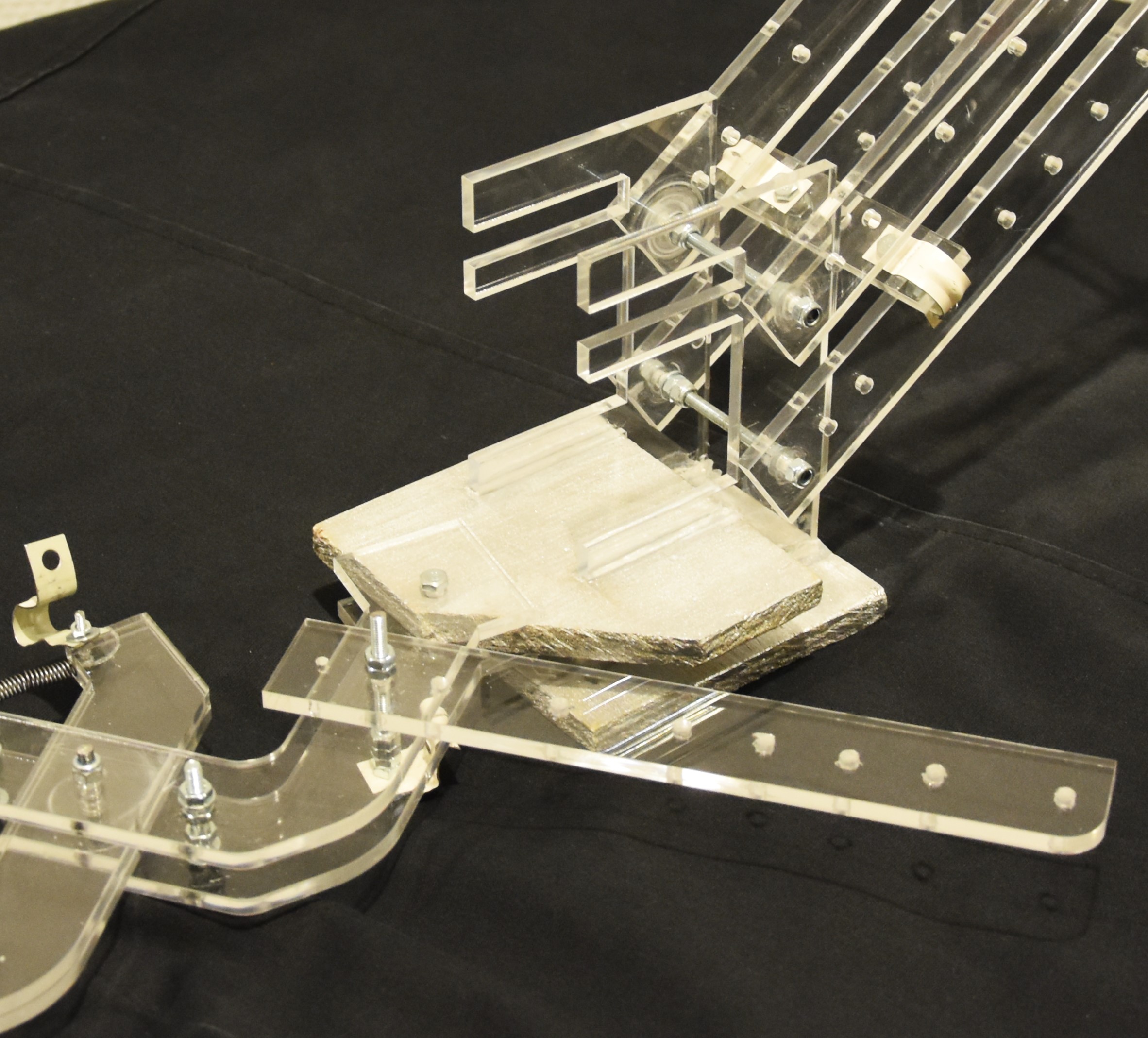
Horizontale beweging
Het onderdeel dat verantwoordelijk is voor de horizontale beweging bestaat uit twee houten platen, een arm en een actuator. De houten plaat waaraan de arm van de grijper aan verbonden is en roteert is vastgezet tussen de twee tanden van de twee verticale platen. Deze houten plaat heeft voor een praktische reden een hoek eraf, namelijk om de mogelijke hoek van draaiing te vergroten. De extra hoek die de arm kan maken is essentieel omdat de arm in een hoek, bijna dwars ten opzichte van de rechte armen, als beginpositie heeft. Vanaf deze beginpositie kan de actuator een maximaal moment leveren door de arm van zich af te duwen. De actuator is bevestigd aan de tweede houten plaat vastgezet onder de twee tanden van de kam. Deze twee platen zijn zodanig gepositioneerd dat de draaibeweging zo min mogelijk belemmerd wordt. Omdat ook in deze beweging een draaibeweging plaatsvindt is de actuator zodanig bevestigd dat het met de gemaakte hoek kan meebewegen.