



Tekeningen van ontwerpen
Wij zijn begonnen met het ontwerpproces door samen te bespreken wat er allemaal mogelijk was, Hoe pak je de beker? Pak je hem van de zijkant of van boven? Pak je hem bij de rand of klem je hem vast? En hoe til je hem vervolgens op? Met een scharnierende arm, een tandwiel systeem of toch met een katrol?
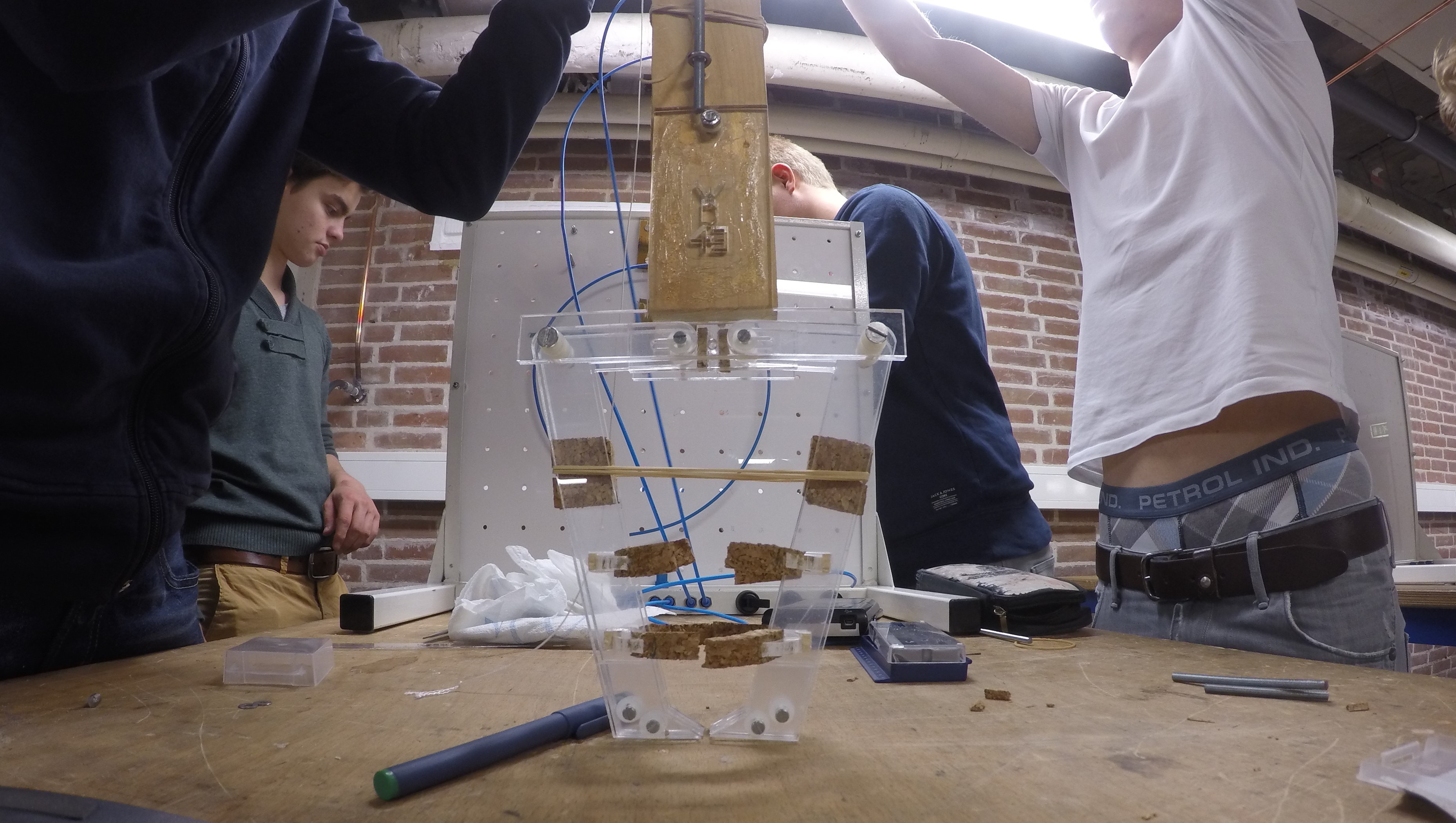
De knijper
Het eerste ontwerp voor de grijper is uitgewerkt door Martijn. Bij dit ontwerp wordt de beker opgepakt door aan twee kanten de rand vast te klemmen. Dit systeem werkt door tanden aan te brengen op de vingers en een beugel die tussen beide paren vingers zat. Door met de actuator deze beugel omhoog te trekken worden de vingers gesloten en de beker vastgepakt.
De killer
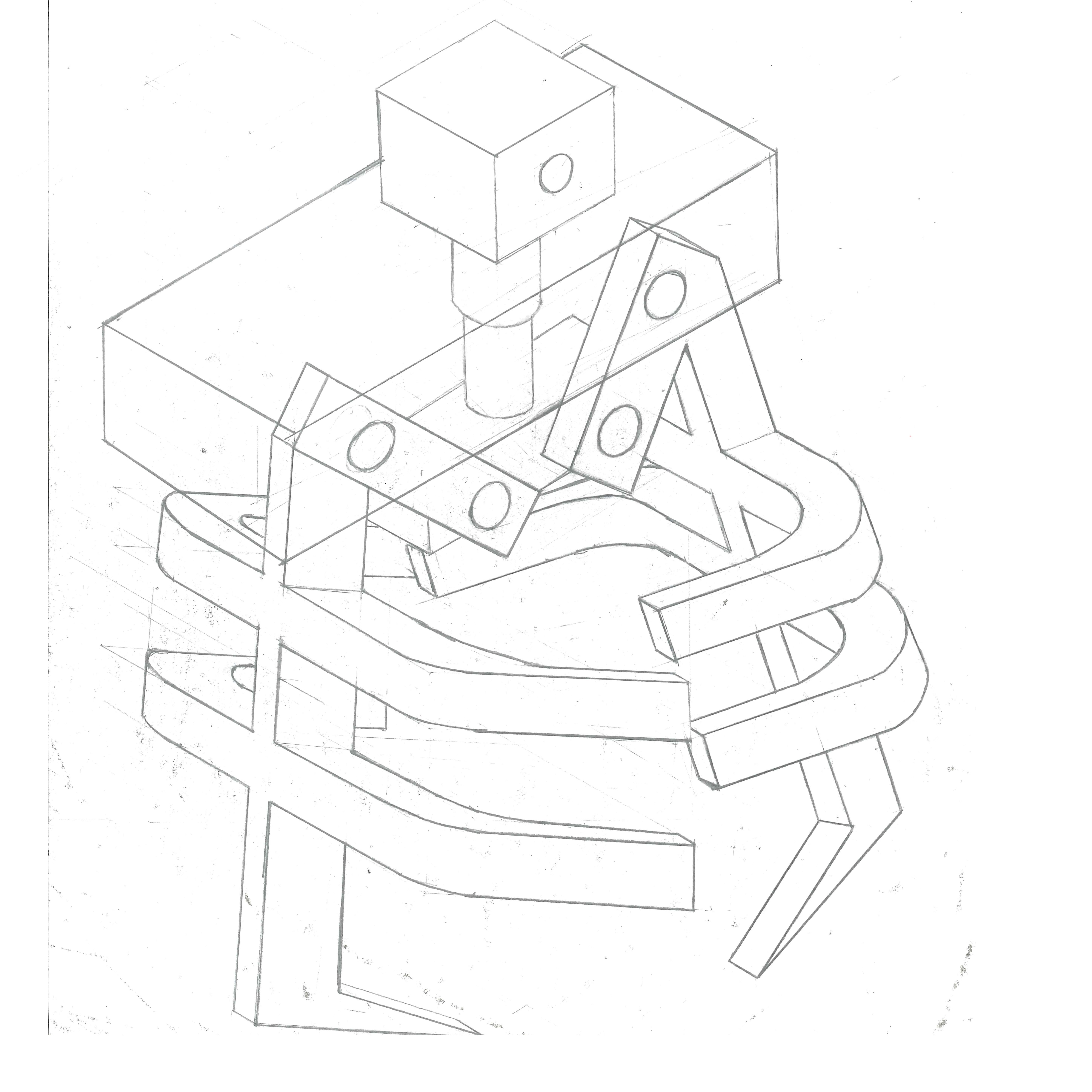
Het tweede ontwerp is van Pepijn. Dit ontwerp werkt met twee armen met gebogen vingers die zorgen dat de beker niet omvalt in de grijper. Ook zitten er onder aan de armen twee schuine punten die onder de beker schuiven. Deze grijper wordt geopend met hefbomen door de actuator uit te schuiven en wordt gesloten door de actuator weer in te trekken.
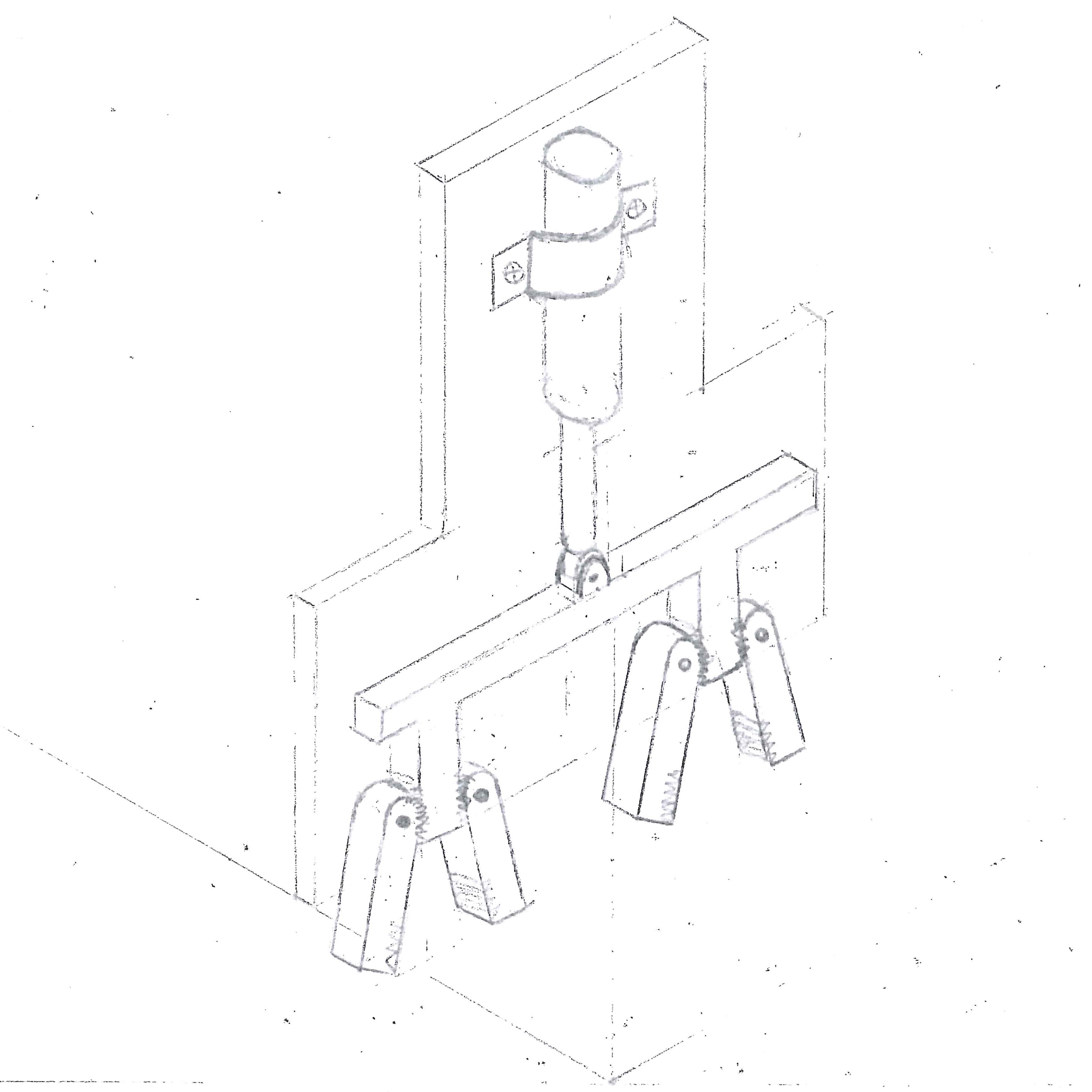
De 4-potige-grijper

Het derde ontwerp is geschetst door Laurens. Dit ontwerp heeft in plaats van twee 4 armen die de beker vastpakken en werkt het zelfde als het vorige ontwerp.
De zijwaartsegrijper
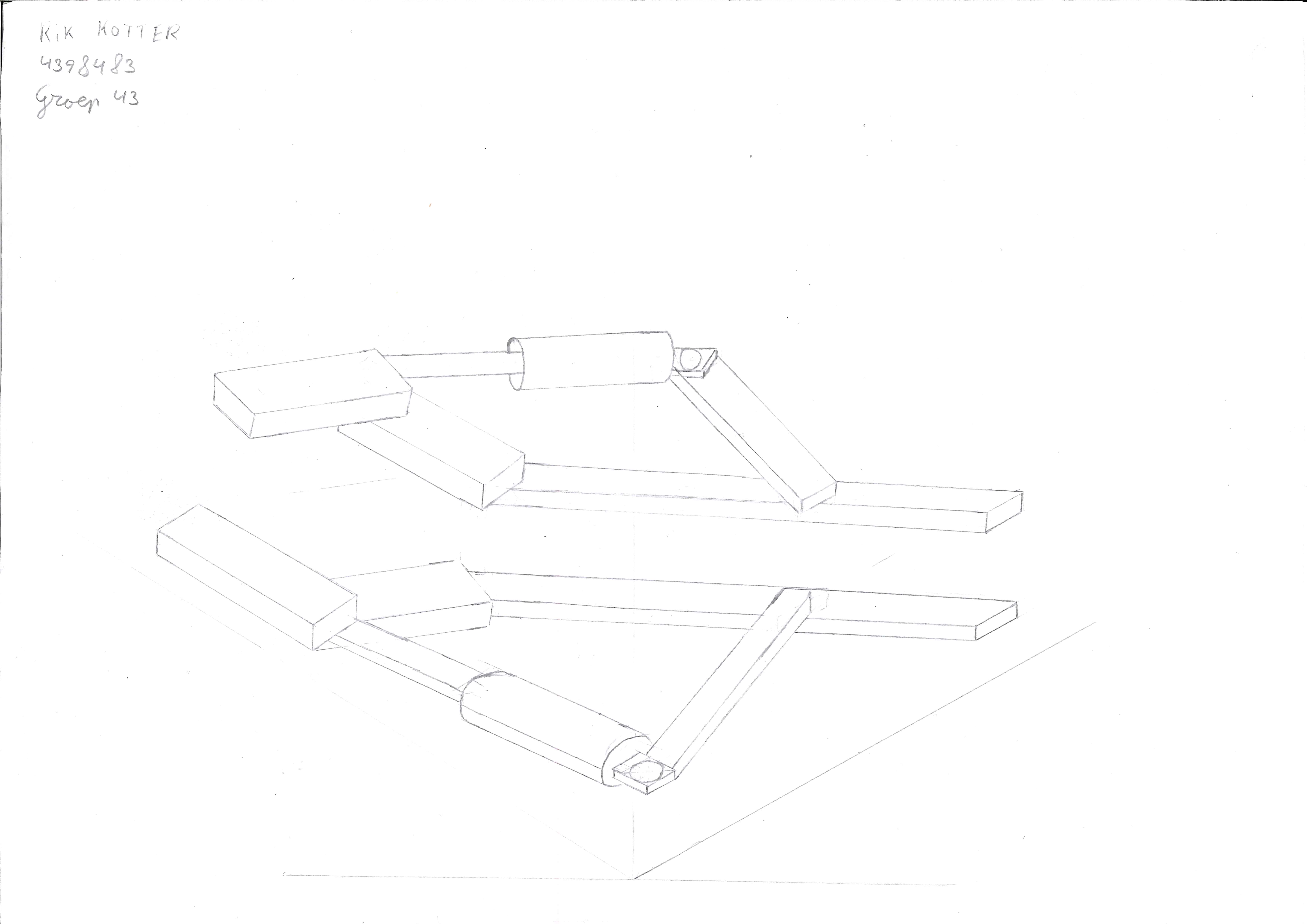
Het laatste ontwerp is van Rik. In plaats van te grijpen in de verticale richting grijpt deze grijper in de horizontale richting. Het werkt bij wijze van spreken als een menselijke hand. Hij wordt door middel van de arm op de juiste plaats gebracht en grijpt dan zijn vingers dicht. Als de grijper zijn vingers dicht heeft om de beker bij een bepaalde dikte dan zal de beker ook niet meer naar beneden zakken doordat de beker schuine wanden heeft.
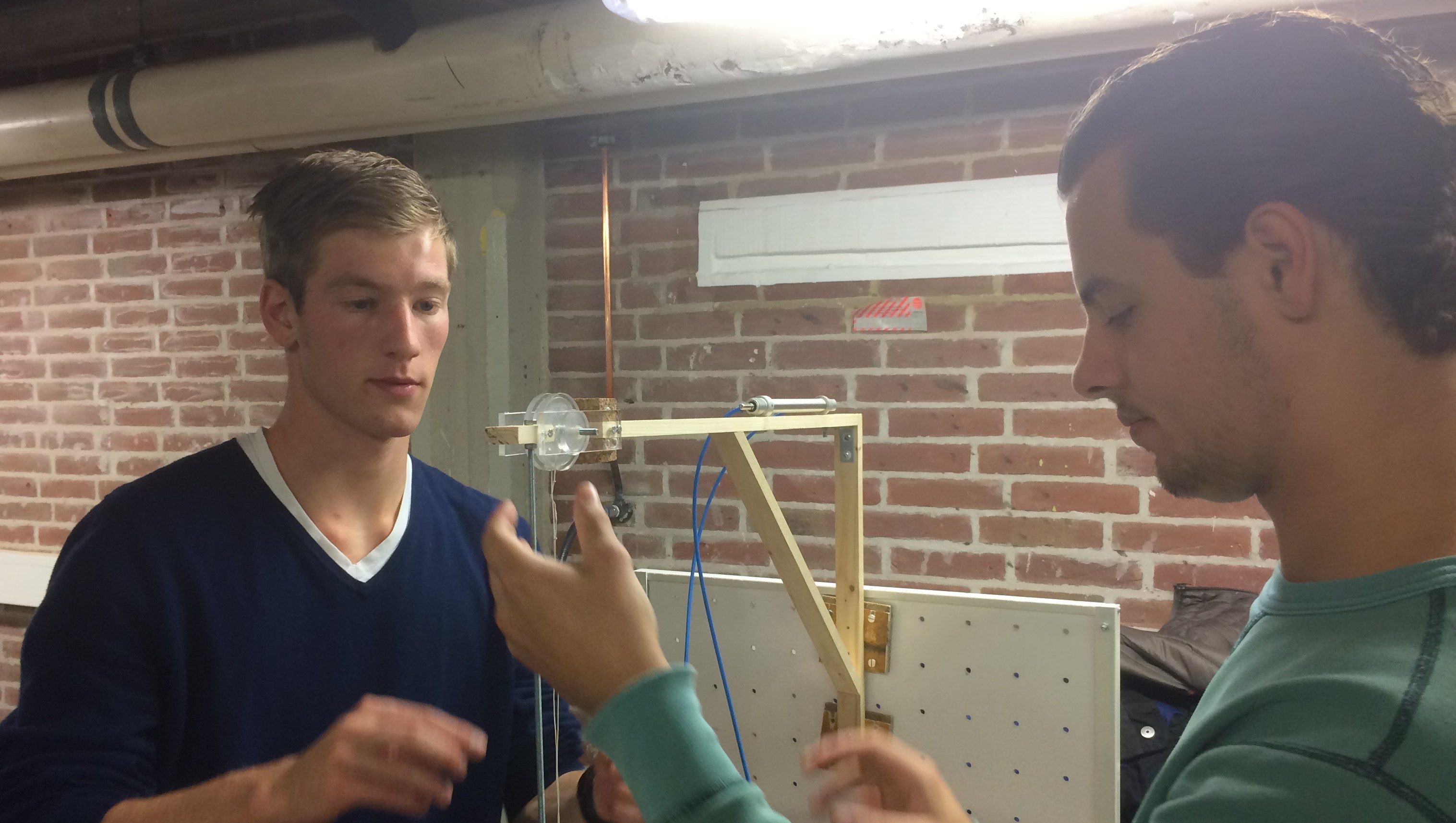
De aula-lift-arm
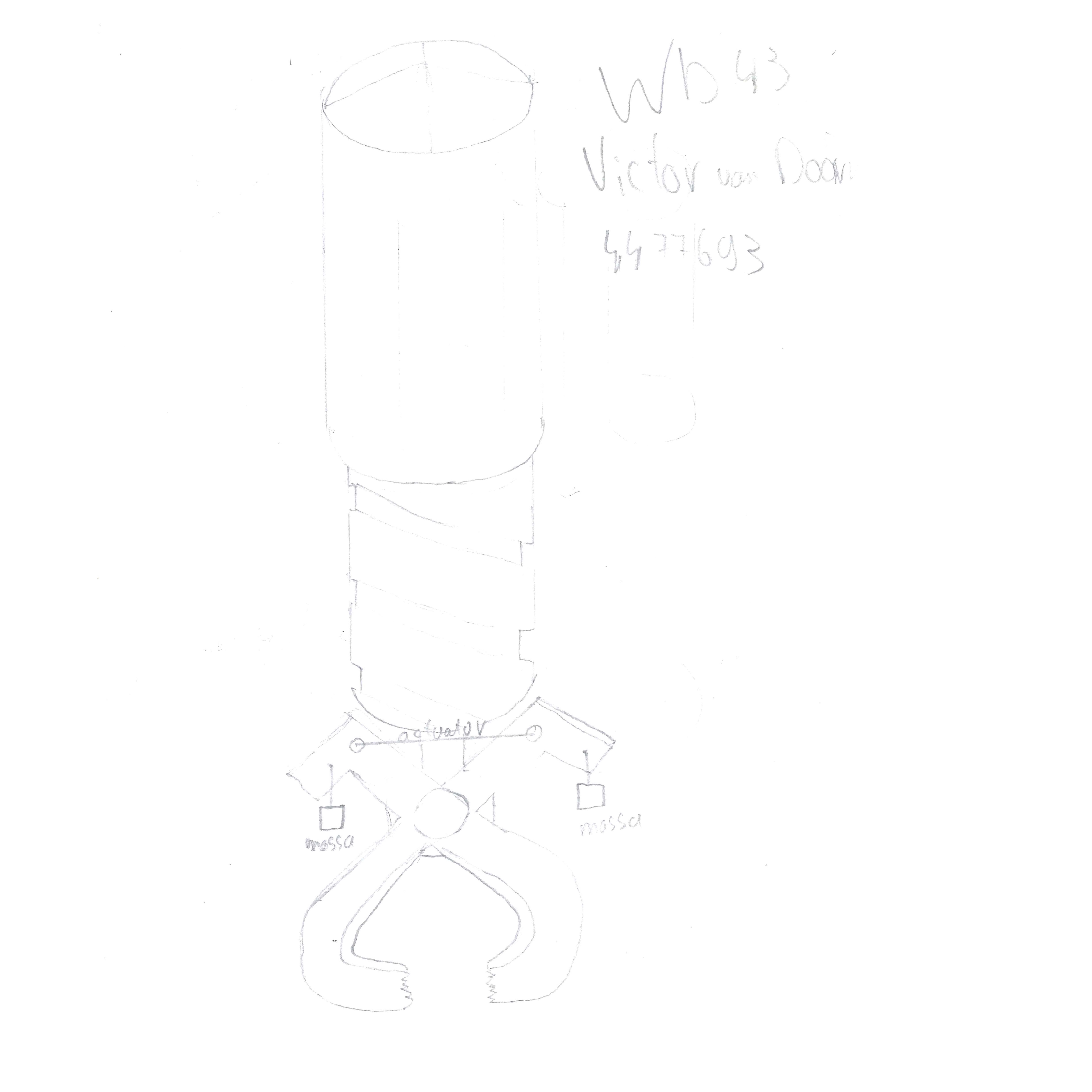
Uit deze brainstormsessie rolden twee ontwerpen voor de arm en vier ontwerpen voor de grijper. Deze hebben we ook uitgewerkt met handschetsen. Het eerste ontwerp voor de arm bestond uit een schroefsysteem afgeleid van de werking van de lift in de aula. Dit ontwerp is uitgewerkt door Viktor
De rail
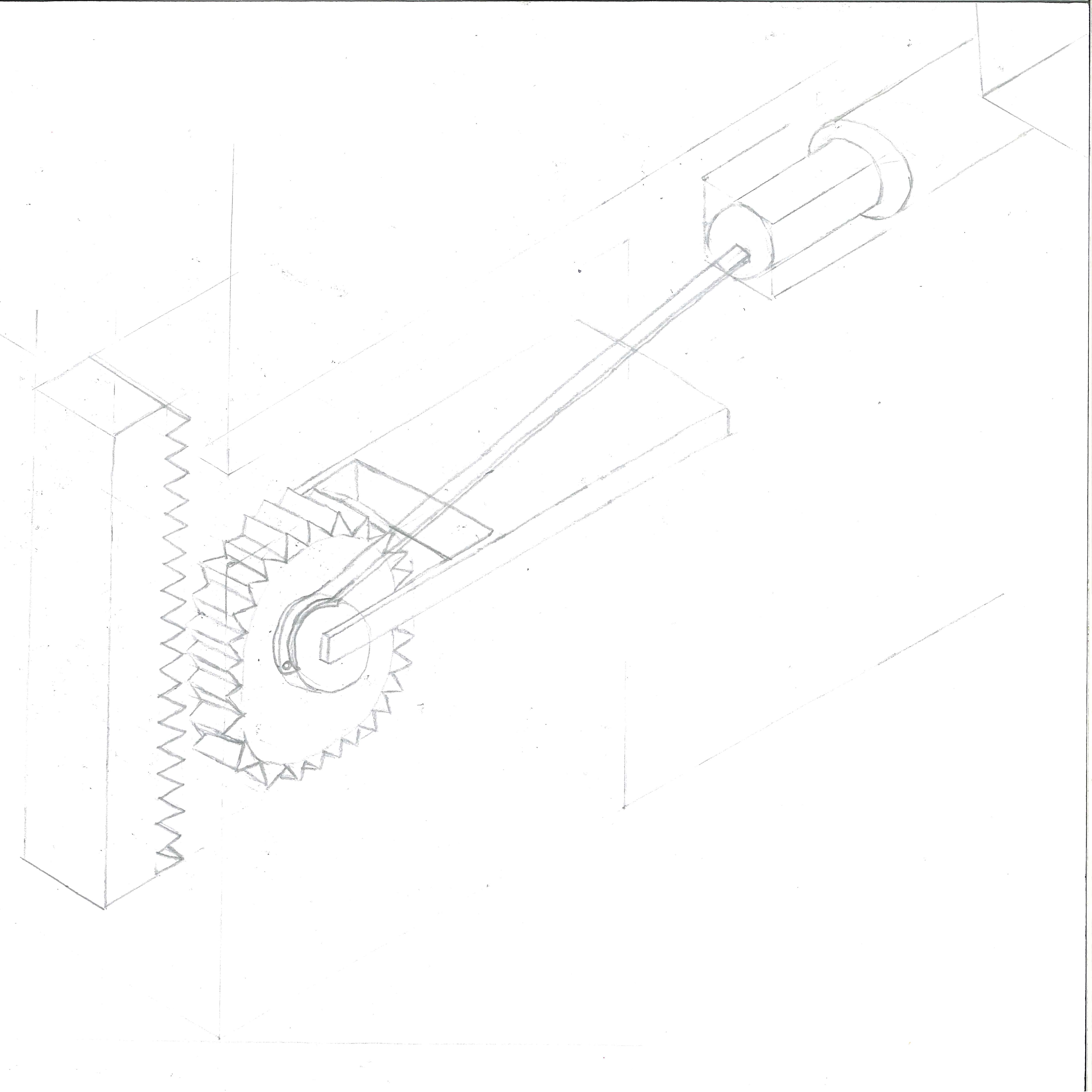
Het tweede ontwerp was een systeem met tandwiel en tandheugel waarbij de grijper vast zat aan de tandheugel zodat deze stabiel op en neer kon bewegen aangedreven door het tandwiel. Dit ontwerp is uitgewerkt door Thomas.
Met behulp van deze schetsen hebben wij een morfologisch schema gemaakt. Hierin staan alle criteria die wij belangrijk vinden. Meer weten?
Uiteindelijk hebben wij 2 grijpers gecombineerd tot onze uiteindelijke grijper. Benieuwd naar ons uiteindelijke ontwerp?