Morfologisch overzicht
|
|
Oplossing 1 |
Oplossing 2 |
Oplossing 3 |
Oplossing 4 |
Oplossing 5 |
Oplossing 6 |
|
Hijsen |
|
|
|
|
|
|
|
horizontaal verplaatsing |
|
|
|
|
|
|
|
Grijpen |
|
|
|
|
|
 |












|
uitleg van de ontwerpen |
oplossing 1 |
oplossing 2 |
oplossing 3 |
oplossing 4 |
oplossing 5 |
oplossing 6 |
|
Hijsen |
Met behulp van een touw de arm omhoog trekken |
Arm over een rails omhoog duwen. |
vierstangenmechanisme ophijsen |
gehele bouwwerk op en neer bewegen |
Arm als wip draaien |
|
|
Horizontaal verplaatsen |
De arm bevestigen aan een scharnier |
Arm horizontaal bewegen over rails |
hele bouwwerk bevestigen aan scharnieren |
ophanging horizontaal bewegen over rails |
Arm na hijs onderdeel scharnieren |
|
|
grijpen |
voorwerp naar binnen scheppen |
voorwerp klemmen als een schaar |
voorwerp klemmen met 1 vaste en 1 bewegende klem |
voorwerp klemmen met 2 bewegende klemmen |
van bovenaf vastklemmen |
klemmen met dubbel schaarsysteem |
Bij het kiezen van de beste oplossing voor het uitvoeren van de functie hebben we niet alleen gekeken naar of het ontwerp voldoet aan de gestelde eisen. Ook hebben we rekening gehouden met een aantal andere factoren. Enkele zijn: is het makkelijk om het te fabriceren, is de kans op falen groot, is het stevig genoeg om de klappen van de actuatoren te weerstaan en is het eventueel makkelijk aan te passen.
Nadat iedereen zijn mening had gegeven over de oplossingen hebben we samen een set oplossingen gekozen waarmee we verder kunnen. Voor het hijsen hebben we oplossing 2 gekozen, voor het horizontaal verplaatsen oplossing 5 en als laatst voor het grijpen oplossing 3.
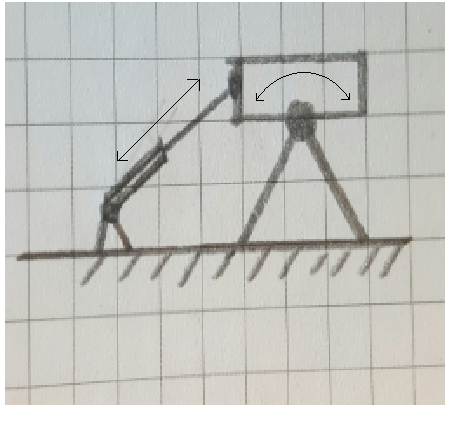
HIJSEN: We hebben gekozen voor oplossing 2. Dit is een relatief simpel ontwerp ontwerp, en gelijk ook de meest robuuste van allemaal. Dit ontwerp lijkt ons het meest bestendig tegen de harde klappen van de actuator, en is makkelijk om te bouwen. Verder verwachten wij dat dit design het meest faal-bestendig is, want er zijn geen touwen (oplossing 1) die kunnen breken of wiebelige mechanisme(oplossing 3) die stuk kunnen gaan.
HORIZONTALE VERPLAATSING: Voor de horizontale verplaatsing hebben we gekozen voor oplossing 5. Deze oplossing past het best bij de oplossing voor het hijsen. Dit is een van de enige oplossing die niet aan het bord bevestigd zit en dus ook niet apart omhoog of omlaag moet kunnen. Met deze oplossing kunnen we ook heel gemakkelijk het uitzwaaien van de arm regelen door de actuator verder of dichterbij de arm te bevestigen.
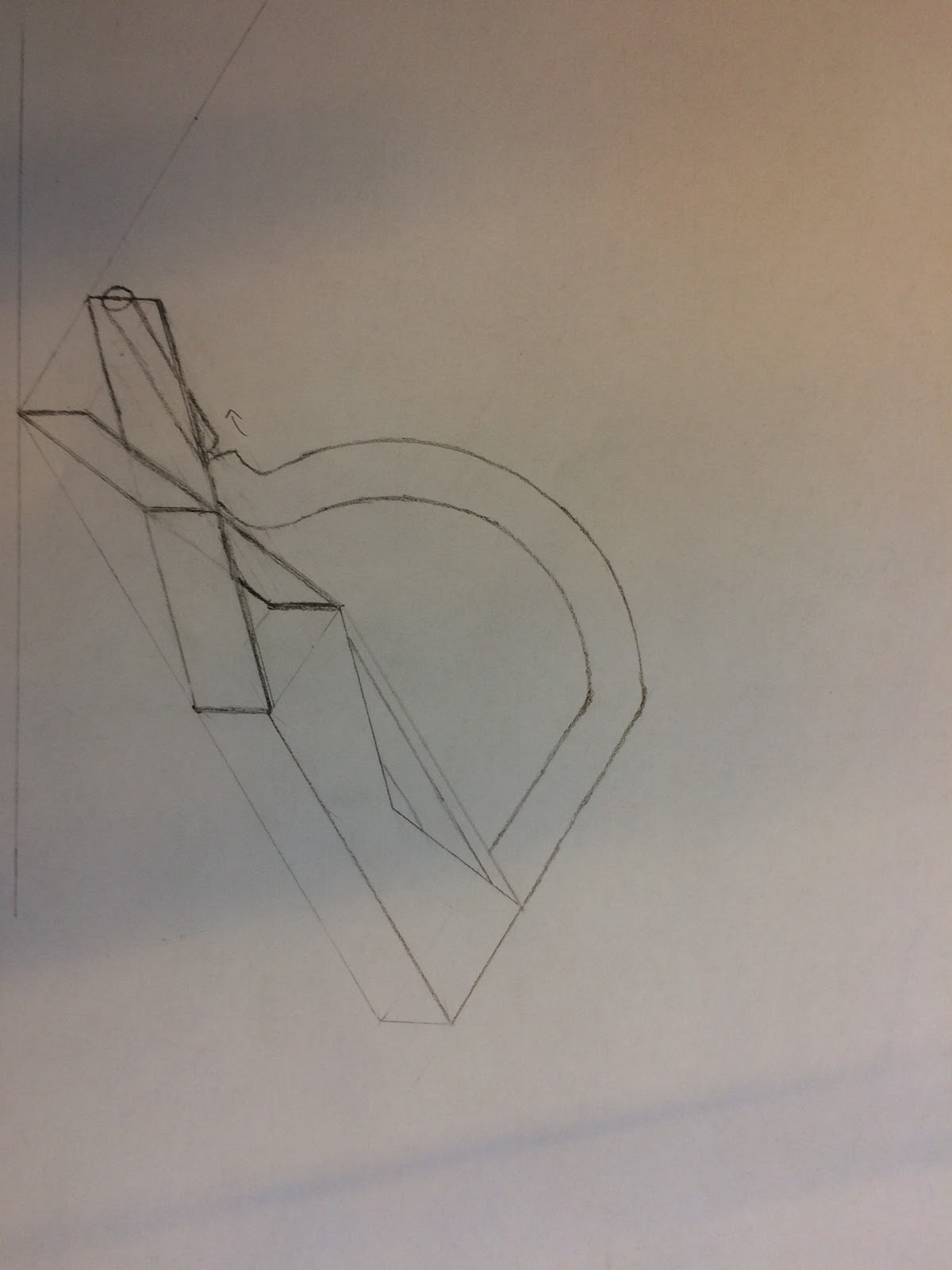
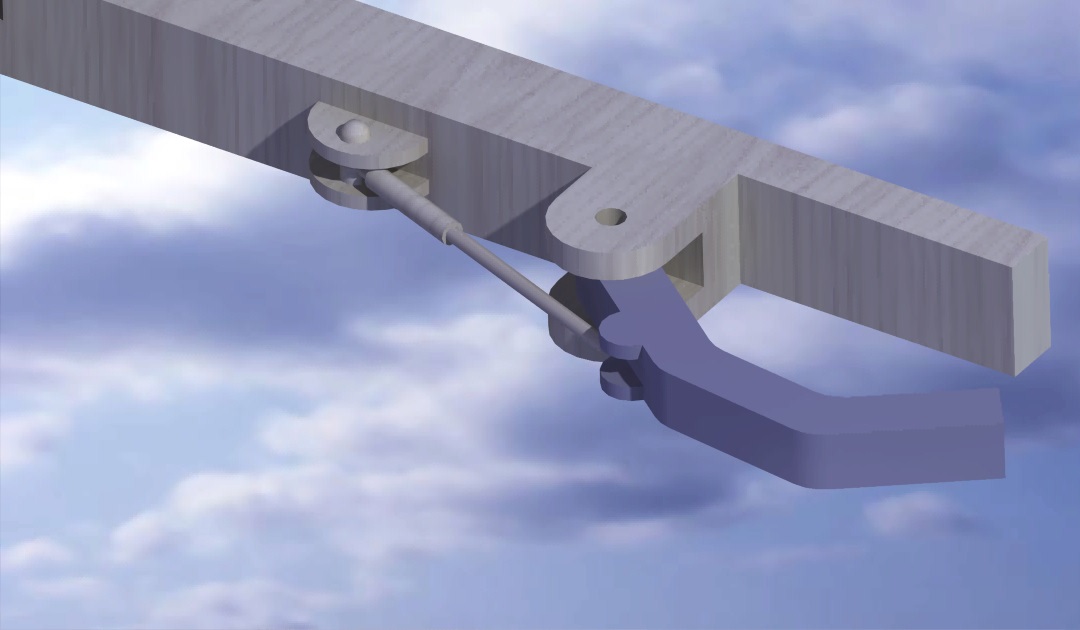
GRIJPEN: Voor het grijpen hebben we oplossing 3 gekozen. Dit omdat een stevige manier van grijpen geeft. Ook kan deze grijper het voorwerp neerzetten en de arm weer wegdraaien zonder dat het voorwerp mee wordt getrokken. Dit omdat de grijper zichzelf verder dan 90 graden kan openklappen.
Om ervoor te zorgen dat het voorwerp goed blijft zitten in de grijper hebben we besloten ook nog te onderzoeken hoe we dat kunnen verbeteren.
|
|
oplossing 1 |
oplossing 2 |
oplossing 3 |
|
verbeteren grijpen |
vingers van de grijper beplakken met schuurpapier of rubber |
een schuim aan de binnenkant van de vinger bevestigen |
gebruik maken van elastiek |



We hebben gekozen voor oplossing 3. Als we even terugkijken naar de eisen zien we dat de grijper verschillende vormen voorwerpen moet oppakken (vierkant en rond). Als we gebruik maken van elastiek dan maakt de vorm van de grijper en die van het voorwerp niet meer uit, want het voorwerp komt dan te hangen in de elastieken. Ook heeft elastiek een relatief grote wrijvingsfactor en hoeven we dus ook niet bang te zijn dat het voorwerp uit de grijper valt.