Project site WB1130 - Groep wb069 -
 "
"
"
"
Nadat er een ontwerp gekozen was, moest het verder ontworpen worden. Zo moesten de armen lang genoeg zijn om de hoogte van 150 mm te kunnen halen, maar ook op de perspex plaat passen. De vingers van de grijper werden zo gekozen, dat ze om bekertjes, flesjes en vierkante pakken zouden passen. Het inleveren van de DXF file voor het snijden van de perspexplaat gaf wat vertraging; er stonden namelijk nog onnodige maatlijnen op die weggehaald moesten worden. Daardoor was het snijwerk helaas wat later klaar. De andere materialen kwamen van de bouwmarkt of werden van thuis meegenomen. En zo kon het in elkaar zetten beginnen.
|

|

|

|
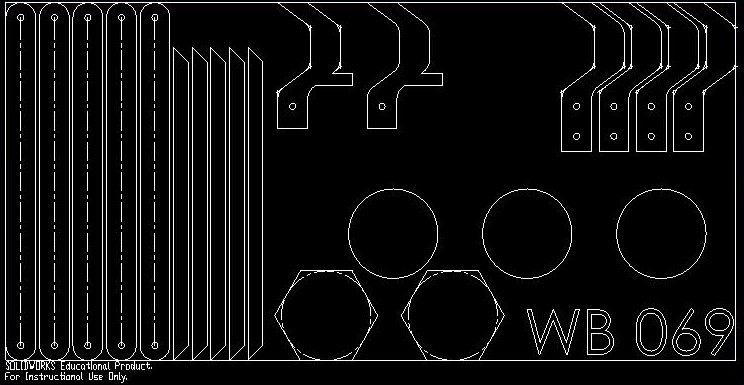
Links staan de afgekeurde DXF-files, met overbodige maatlijnen, en rechts de goede afgebeeld. De maten van de vingers hebben we bepaald met een uit karton geknipt prototype, terwijl we de benodigde poten hebben berekend via de volgende tekening:
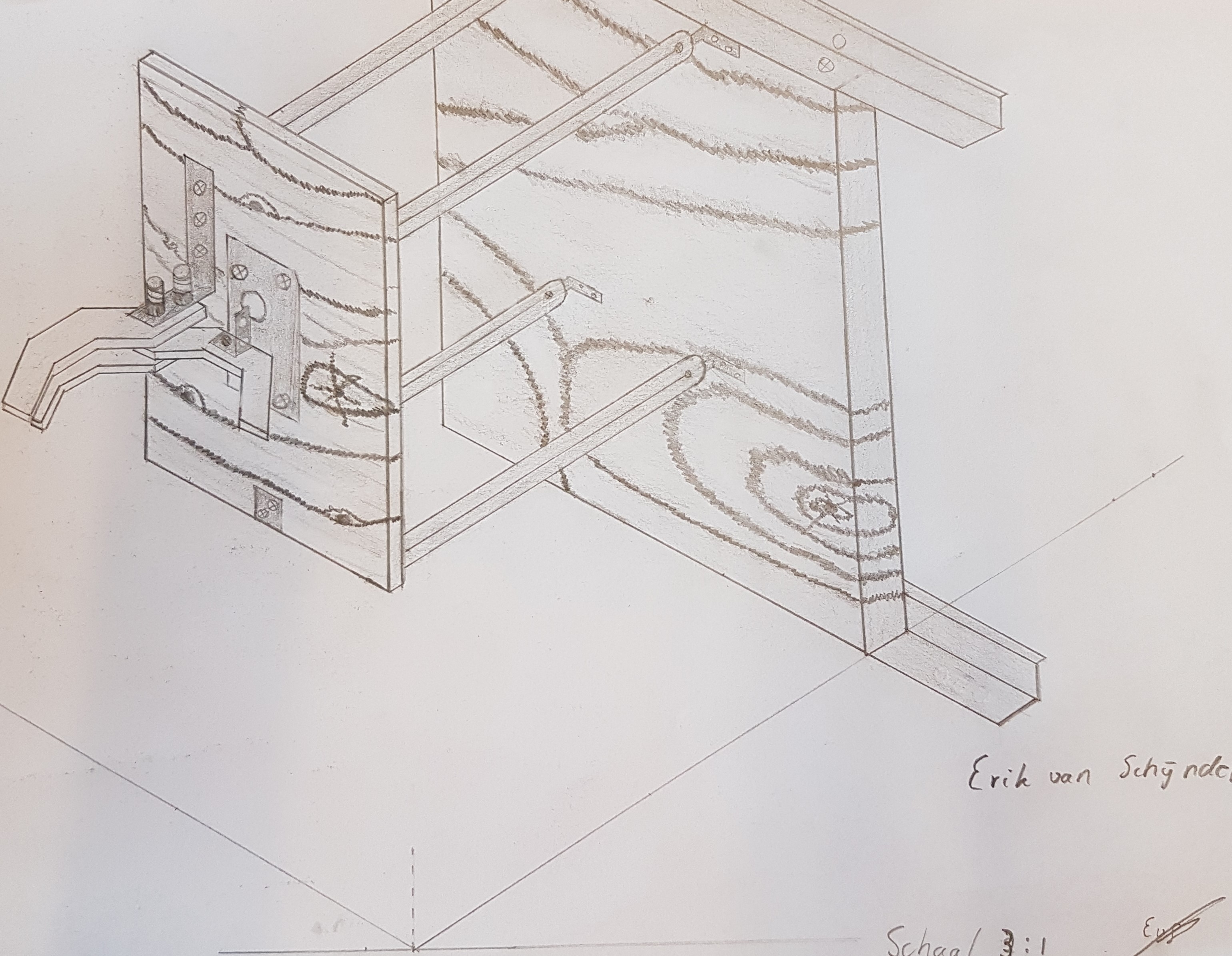
Na het complete ontwerpproces doorlopen te hebben (inclusief Dxf-files) wilden we een compleet beeld hebben van de grijper, dit inclusief details zoals verbindingen en bouten. We besloten daarom een volledige ontwerptekening te maken, hierboven weergeven.
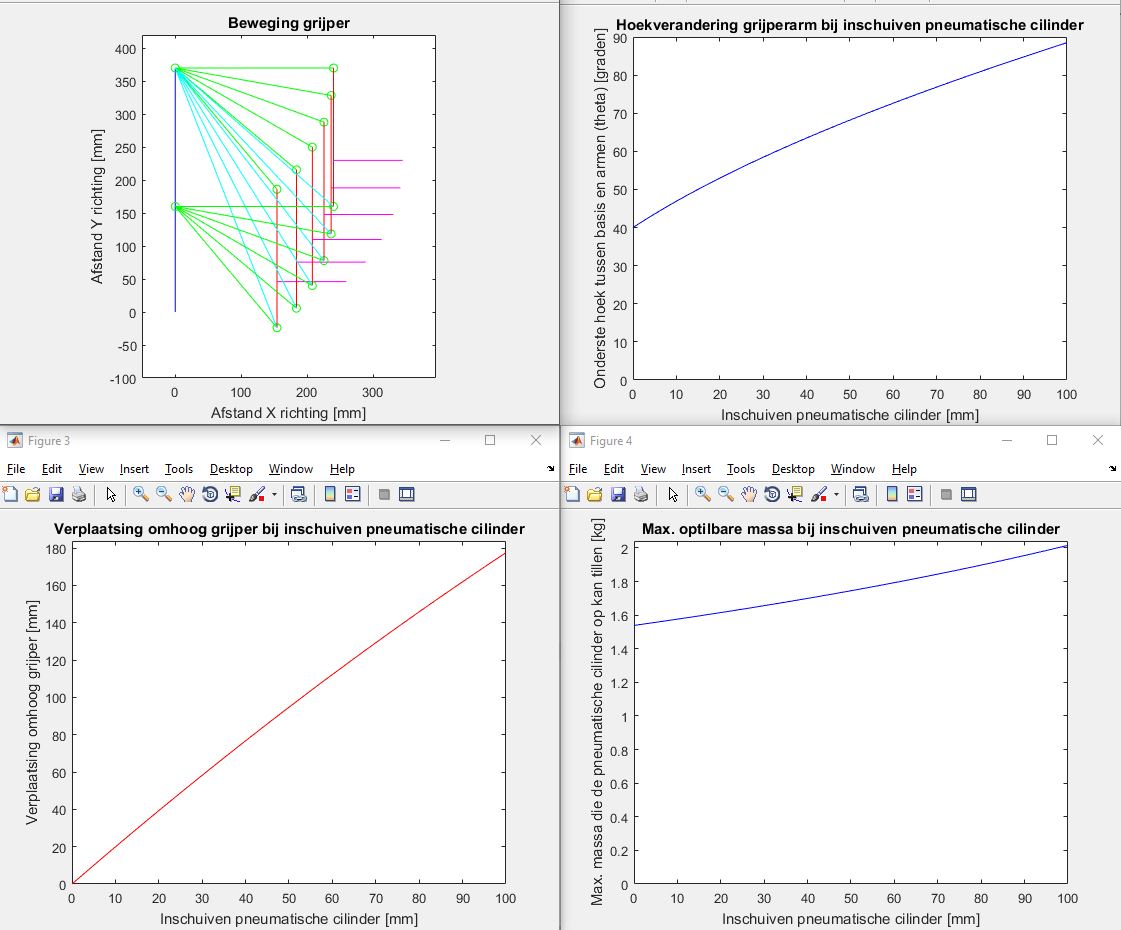
Dankzij deze vier grafieken hadden we een goed beeld van de mogelijkheden van de grijper. Op de foto rechtsboven is het bewegingsbereik te zien van de grijper. Hiermee konden we zien of de grijper wel daadwerkelijk 15 cm omhoog kon. In de figuur linksonder is te zien hoeveel de actuator moest uitzetten om de gewenste verplaatsing te bereiken. Er was bekend wat de maximale uitzetting van de actuator was (10 cm), waardoor we wisten dat we de 15 cm zouden halen m.b.v. ons touw-en-katrolsysteem en het vierstangenmechanisme. Ook wisten we hoeveel kracht de actuator kon leveren bij de maximum beschikbare druk (ongeveer 7,5 bar). Hiermee konden we berekenen wat het maximale gewicht was dat de actuator kon optillen. Hieronder is de matlab code te zien die we hebben gebruikt voor de grafieken.

Toen we uiteindelijk het gesneden perspex kregen, konden we beginnen aan het produceren van onze grijper. Jari en Fabian hebben dit uiteindelijk op zich genomen en kwamen al vrij snel tot een object. Na een paar dingen te hebben veranderd, konden we het concept een keer testen in de assemblagewerkplaats (AWS). Deze test was echter niet helemaal vlekkeloos verlopen en omdat dit de laatste kans zou zijn om ons prototype te testen, hadden we een probleem. Uiteindelijk hebben we nog een paar uur gekregen vlak voor de deadline om het te testen, waarbij alles wel goed werkte en hier hebben we goed de grijper in goede werking gezien. Hier hebben we ook goed beeldmateriaal van onze grijper in actie kunnen filmen.