Kasten

Gewoon Jesse

Jelluh

Salsa
Sybetje

IO

Wij zijn Jesse, Jelle, Sybe, Femke, Roald en Didi. Voor het vak technische systemen hebben wij afgelopen periode een grijper moeten ontwerpen. De opdracht luidde: “Ontwerp een mechanische grijper die plastic en kartonnen bekertjes met en zonder inhoud snel en probleemloos kan oppakken.” De eisen waar deze grijper aan moest voldoen waren de volgende:
Vanuit deze gegevens zijn wij aan de slag gegaan. Elk individu uit de groep heeft 1 of meerdere schetsen gemaakt.
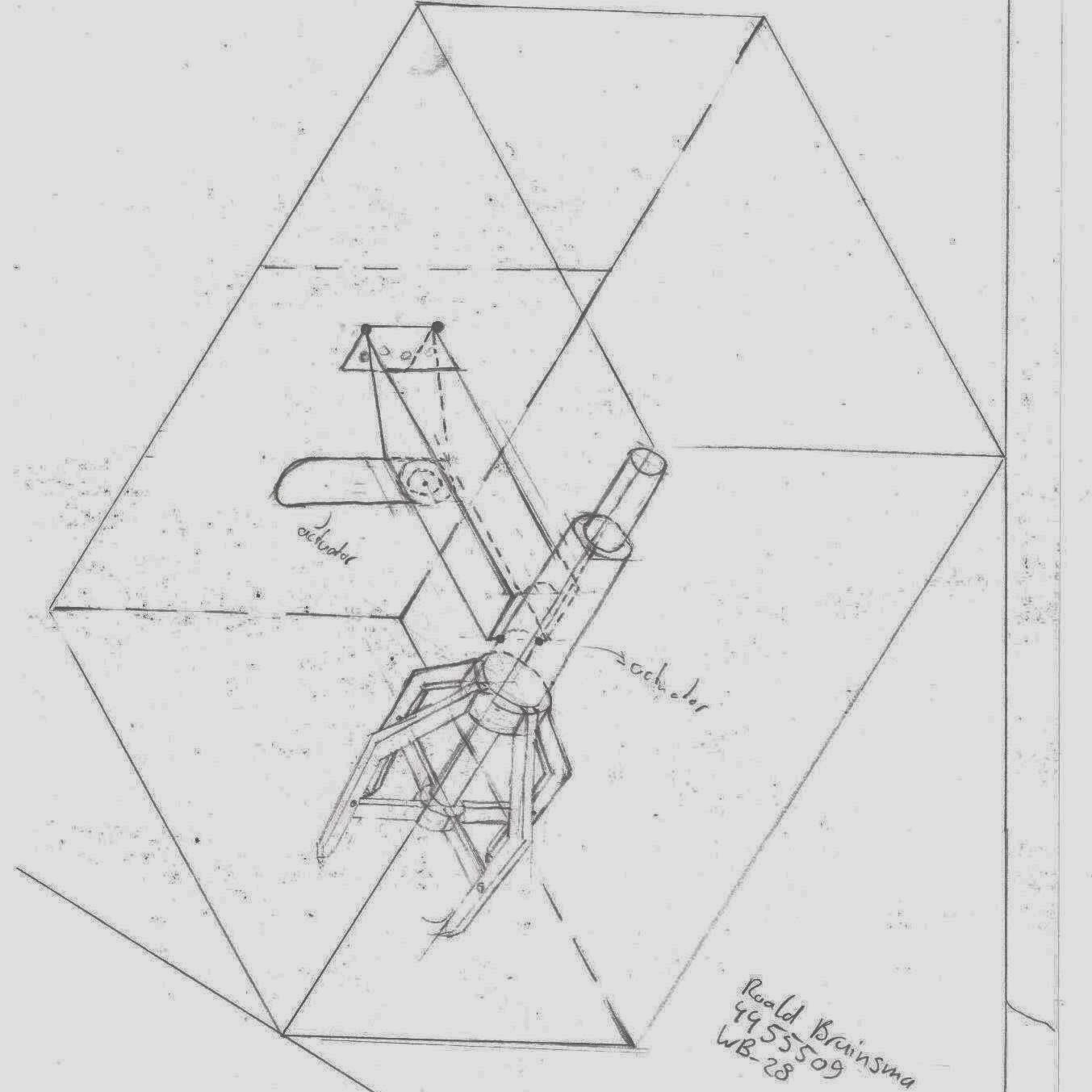 |
Ontwerp RoaldRoalds ontwerp was een beetje gebaseerd op het mechanisme van een kermisattractie. Het was een grijphand met 4 vingers. Aan deze vingers werd een koppelstang bevestigd, die in verbinding stond met de actuator. Op het moment dat de actuator dan uitschoof, duwden de koppelstangen de vingers naar buiten. En andersom op het moment dat de actuator inschoof, trokken de koppelstangen de vingers als het ware strak tegen de beker aan. |
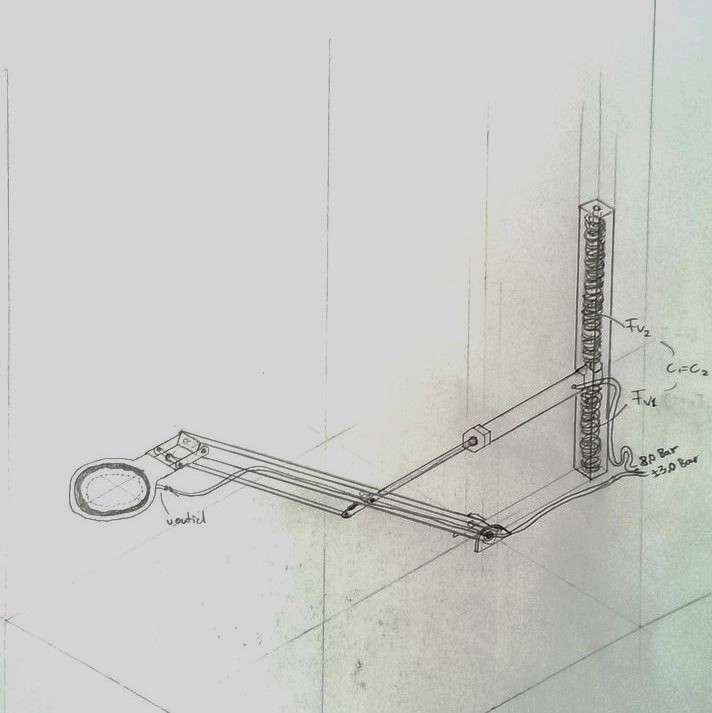 |
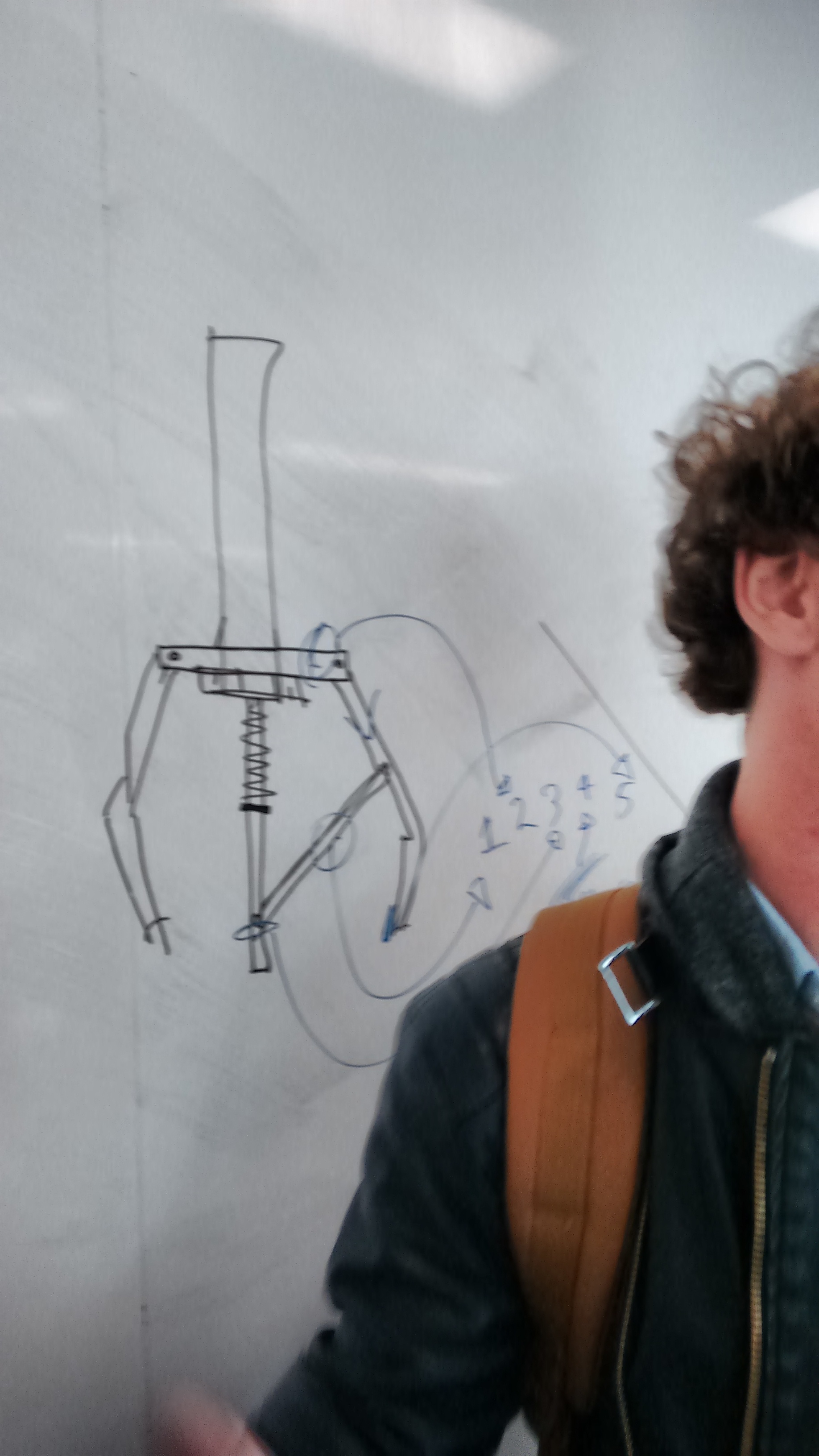
Ontwerp SybeBij het ontwerp van Sybe hebben we voornamelijk gekeken naar de arm, omdat hij hier zijn aandacht en ontwerp op had gefocust. De basis van het ontwerp van Sybe was een staaf met twee veren daar omheen. Tussen deze veren zat de actuator aangesloten. Vervolgens zat de arm van de grijper aan de grond vast met een scharnier. |
 |
Ontwerp FemkeBij het ontwerp van Femke hebben we ons opnieuw gefocust op de arm. De grijper zelf leek erg op het ontwerp van Didi, namelijk met magneten, dus hebben we het magneet-concept beoordeeld onder Didi’s concept. De arm van Femke werd omhoog gehesen door een katrol waarin twee scharnieren in elkaar staken. |
Vervolgens hebben wij een gewogen criteria/ eisentabel gemaakt over wat wij belangrijk vonden aan de grijper. We hebben elk onderdeel een aantal punten toegekend en ieders schets een cijfer gegeven op elk punt. Door de cijfers met de weging te vermenigvuldigen kwamen we op een totale uitslag. Op basis hiervan hebben we een schets uitgekozen die we vervolgens wilden uitwerken.

In de tabel is te zien dat het ontwerp van Sybe en Femke de hoogste eindscore kregen. We hebben bij hun ontwerp vooral gekeken naar de arm en niet zozeer naar de grijper zelf, omdat deze kwalitatief wat minder was. De hoogste score voor de echte grijper zelf was Roalds ontwerp. De groep was van mening dat dit niet de meest originele, maar waarschijnlijk wel de meest effectieve grijper zou zijn. De grijper van Roald heeft verschillende contactpunten met de beker waaraan ook nog een materiaal zou kunnen worden toegevoegd met een hoge wrijvingscoëfficiënt. Daarnaast kun je bij deze grijper de maximale samentrekking instellen, waardoor de beker niet helemaal geplet wordt en de inhoud in de beker blijft.
Voor de arm hebben we uit geen van alle ontwerpen gekozen. Hier zijn we door het ontwerpproces heen mee gekomen. We hebben tijdens een van de meetings hier een gezamenlijke schets van gemaakt. Voor de arm hebben we een differentiaalkatrol gebruikt. Ons hijsmechanisme is dus gebaseerd op een touwtje aan een katrol. De kleine katrol is de halve diameter van de grote katrol. Wanneer de kleine katrol dus een even grote hoek maakt als de grotere katrol, is de afgelegde afstand van het touw aan de grote katrol 2x zo groot.
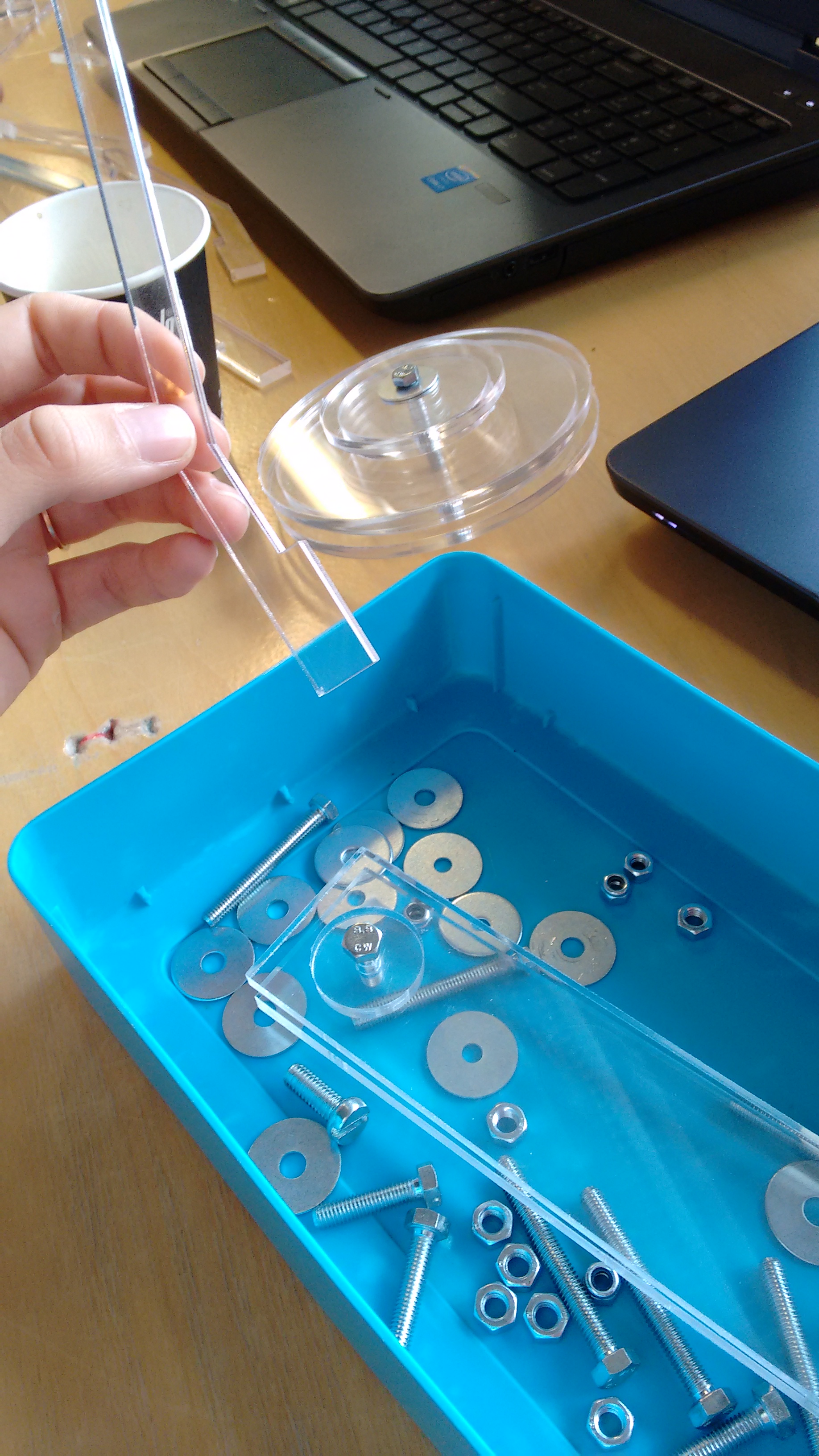
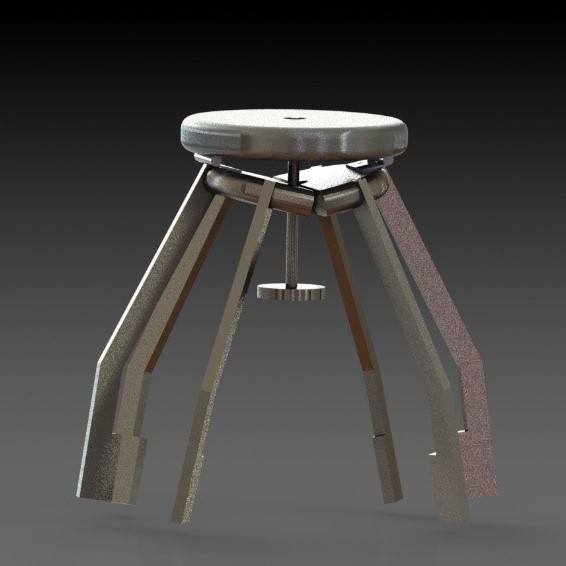
Voor zowel de katrol als de 6 grijperarmen hebben we perspex/PMMA gebruikt. Allereerst hebben we hier voor gekozen omdat zo direct alles voor ons op maat werd gesneden. Bovendien kan perspex een hoge spanning weerstaan en is het redelijk sterk. Ook is het nog redelijk bewerkelijk wat vanzelfsprekend erg handig is. Perspex is erg licht dus is goed te gebruiken voor de grijper aangezien deze zo licht mogelijk moet worden gemaakt. Hoe lichter de grijper is, hoe meer gewicht kan worden getild.
Een nadeel van perspex is dat het erg glad is. Daarom hebben we er voor gekozen om rubber te bevestigen op de uiteindes van de 6 perspex armen. Rubber staat bekend om zijn hoge wrijvingscoëfficiënt. Dit is erg belangrijk voor de grijper omdat het bekertje er niet tussenuit moet glijden.
In de grijper bevinden zich twee ringen van hardhout. We hebben voor hardhout gekozen omdat dit eveneens erg sterk is. Ook is het hout niet overdreven zwaar en wel erg bewerkelijk. Het hout zorgt voor een stabiele constructie die tevens soepel verloopt.
Het scharnier is vermessingd en bevat een centrum van zink. We hadden vrij weinig keuze in het materiaal van het scharnier en we hebben hier ook niet heel erg op gelet. Voor de schroeven komt dit op ongeveer het zelfde neer. We gaan er vanuit dat deze eveneens vermessingd zijn of gelegeerd zijn, maar het precieze materiaal weten we niet. Zij voeren hun functie goed uit, namelijk het scharnier bevestigen aan de ring van hout en de twee armen. Voor de bouten en de stangen geldt eveneens het zelfde verhaal, het gaat er om dat ze hun functie kunnen uitvoeren.
We hebben gekozen voor touw omdat het soepel en redelijk sterk is. Het touw dat we hebben gebruikt is nauwelijks elastisch, wat betekent dat het niet uitrekt. Bovendien is touw goedkoop en kan het goed buigen, wat belangrijk is voor het opwinden bij de katrol.

Wij hebben er voor gekozen om voor onze grijper een katrol te gebruiken en niet zomaar een katrol, maar een differentiaalkatrol. Een differentiaalkatrol valt te vergelijken met de aandrijving van een fiets, bestaande uit de fietskettingen en de tandwielen. Deze ziet er namelijk als volgt uit:
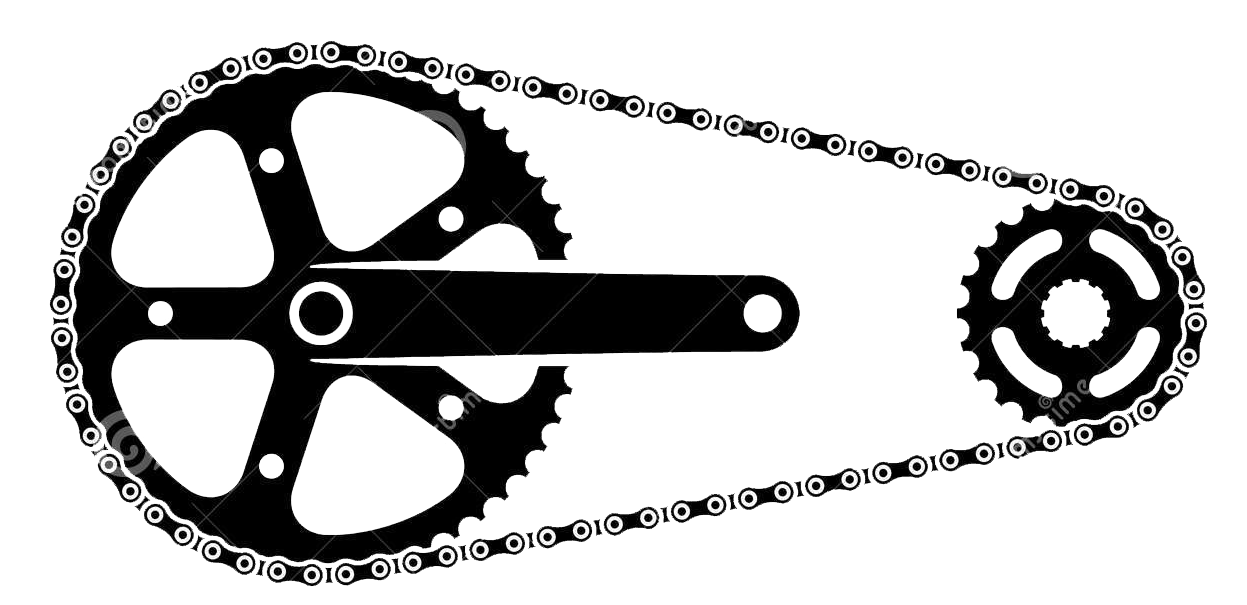
Afb. fiets aandrijving
Het grote wiel wordt bij een fiets aangedreven, het grote wiel is hier met een ketting aan het kleine wiel verbonden. Als het grote wiel gaat draaien moet het kleine wiel dus meedraaien omdat ze aan elkaar zijn verbonden. Dit heeft natuurlijk een functie. Doordat het grote wiel een grotere omtrek heeft dan het kleine wiel gaan de wielen in verhouding draaien. Namelijk voor elk rondje dat het grote wiel draait het kleine wiel ook een rondje. Omdat de stralen van de wielen verschillen kan je op deze manier door het kleine wiel te draaien een grote verplaatsing veroorzaken.
Met deze wetenschap willen wij onze grijper gaan optillen en wel minimaal 25 cm. We hebben bedacht dat we voor het optillen van onze grijper twee actuatoren willen gebruiken. Dit betekent dat we met deze twee actuatoren maximaal 20 cm kunnen verplaatsen. Dit is helaas niet genoeg om de grijper minimaal 25 cm op te tillen. Hier komt de differentiaalkatrol van pas. Want we weten nu dat we met de differentiaalkatrol een relatief kleine verplaatsing om kunnen zetten in een grotere verplaatsing.
Nu moeten we een verhouding kiezen tussen het grote wiel en het kleine wiel. Als we een verhouding van 2:1 kiezen betekent dit dat het grote wiel een 2x zo een grote straal heeft dan het kleine wiel. We hebben er voor gekozen het kleine wiel een straal te geven van 2.5 cm, dit betekent dat het wiel een omtrek heeft van 2.5*2π = 15.7 cm het grote wiel heeft dus een straal van 5.0 cm dit betekent dat het grote wiel een omtrek heeft van 5.0*2π = 31.4 cm. Als het kleine wiel dus 20 cm aflegt, wat gelijk staat aan: 20/15.7 = 1.27 rondje, legt het grote wiel een afstand af van 1.27*31.4 = 39.8 cm wat dus meer is dan de 25 cm die minimaal benodigd was. Met deze katrol kunnen we onze grijper dus optillen.
 |
Door de zwaartekracht kantelen de twee kleine halve cirkels een stuk naar benenden. Omdat de armen hier aan vast zitten gaan deze ook uit elkaar en zullen dus niet in staat zijn om een beker te klemmen. |
 |
 |
Wanneer de actuator zich intrekt, wordt de kleine cirkel onderaan de actuator tegen de opengekantelde halve cirkels aan geduwd. Hierdoor gaan deze mee omhoog en komen ook de armen naar elkaar toe. |
 |
De diameter tussen de armen wanneer de actuator ingetrokken is, is precies de diameter waar het bekertje in past. |
Tijdens het testen kwamen we er achter dat de gleuven van de differentiaalkatrol niet diep genoeg waren. Elke keer als de grijper naar beneden beweegt door het uitklappen van de actuatoren, schiet het touw uit deze gleuven. Dit betekent dat de gleuven dieper moeten zijn om de touwen er in te houden. Dat wil dus zeggen dat de buitenste ringen van de katrol groter worden ten opzichte van de binnenste ringen(de middelste ring wordt ook als buitenste ring beschouwd aangezien 2 katrollen aan elkaar bevestigd zijn en hij dient als houder voor zowel de kleine als de grote katrol).
Bij het testen schiet de grijper heen en weer bij het in en uittrekken van de actuatoren. Dit is natuurlijk logisch aangezien de grijper aan één touw hangt. Om het in en uittrekken van het touw soepeler te laten verlopen, kan een arm vanaf het verticale scherm worden toegevoegd. De arm kan het verloop van het touw beïnvloeden door bijvoorbeeld het touw door een ring te laten gaan. Hierdoor zullen het touw en de grijper minder gaan slingeren en zal het optillen van het bekertje voorzichtiger gaan.
Ook is te zien in het filmpje dat het touw veel te lang is. We hebben het touw opzettelijk te groot gekozen omdat we niet zeker wisten of de differentiaalkatrol optimaal zou werken. Natuurlijk is het touw makkelijk te verkorten, maar het moet dus wel worden aangepast in een verbeterd ontwerp.
Zoals op het filmpje te zien is bewegen beide armen naar beneden door middel van zwaartekracht. Hier schuilt een groot risico achter. Als de zwaartekracht namelijk niet groot genoeg is om beweging in de scharnieren te veroorzaken, zullen de armen dicht blijven staan, wat van zelfsprekend niet de bedoeling is. In het filmpje kan worden opgemerkt dat de ene arm soepeler naar beneden werkt dan de andere, bij de andere is het scharnier dus niet even soepel. Dit kan worden aangepast door bijvoorbeeld een duwveer te plaatsen aan de andere kant van de grijper. Deze veer zal de armen naar beneden duwen als de actuator uitklapt. Daarbij moet wel worden gedacht om hoe sterk de veer is, de armen hoeven namelijk niet helemaal uit te klappen. Hierbij kan in de verbetering dus worden gerekend met de veerconstante. De bedoeling is wel dat de veer beide armen even ver krijgt dus hier moet ook rekening mee worden gehouden.
In het filmpje is te zien dat de grijper heel schokkerig naar boven en beneden beweegt. De eerste schok komt als de grote actuator inklapt. De tweede schok komt als de kleinere actuator inklapt. Wat beter kan is natuurlijk de snelheid waarmee dit gebeurt. De actuatoren kunnen namelijk ook geleidelijk in en uitklappen. Hoewel dit meer een verbetering in gebruik is dan een verbeterpunt, moet dit toch worden aangegeven voor een eventueel verbeterde versie.