Oriëntatie
Analyse
Concepten
Uitwerking
Uitvoering

Van september tot en met oktober 2017, is door projectgroep 52 hard gewerkt aan een goed functionerende grijparm. Dit heeft geresulteerd in deze website en een werkende machine, aangedreven door pneumatische actuatoren. Het project heeft plaatsgevonden aan de TU Delft onder begeleiding van de heer Paardekooper en masterstudent Oscar van den Heuvel. De projectgroep bestaat uit voorzitter Nick, notulist Michael, Ian, Joost, Maarten, Roel en Victor.
Het doel van ons project is om een door pneumatische actuatoren aangedreven mechanisme te realiseren dat een appel kan oppakken, om een muur heen kan manoeuvreren en op een naastgelegen plateau kan plaatsen.
Wij hebben de werking van pneumatische actuatoren onderzocht, om deze toe te passen in de grijper en het frame voor verticale en horizontale beweging. Hiervoor zijn vele ideeën bedacht en verwerkt in een morfologisch overzicht. De door ieder gekozen deelfuncties zijn verwerkt tot een concept en een spuugmodel. Deze concepten hebben wij getoetst aan verschillende eisen met behulp van de kesselringmethode, en vervolgens geëvalueerd en uitgewerkt. Zo hebben wij een grijper geproduceerd die appels van variërende grootte kan optillen en verplaatsen.
Wij wensen u veel leesplezier toe en hopen dat u net zo enthousiast bent over ons project als wij dat zijn.
Projectgroep 52
Delft, oktober 2017
Voor het ontwerp van de grijparm hebben wij ons laten inspireren door bestaande grijpers en die van voorgaande groepen. Ook hebben wij onze eigen kennis en kunde gebruikt om verschillende grijpers te bedenken. Zo dachten wij aan elastieken tussen de grijper ter bescherming van de appel, maar ook aan kussentjes. We onderzochten verschillende manieren van de bewegingen van de arm en de grijpers die de appel oppakken. Ook hebben we gekeken of de beweging van de arm met slechts één actuator gerealiseerd kon worden. Dit is terug te zien in het morfologisch overzicht en in de concepten van Roel en Michael.
Het morfologisch overzicht is samengesteld uit de oplossingen voor alle deelfuncties van onze grijper. Elke regel bevat meerdere oplossingen voor één deelfunctie.
| appel grijpen |  |
|---|---|
| arm bewegen |
|
| appel intact laten |
|
| arm bewegen |
Het pakket van eisen en wensen is een combinatie van de eisen en wensen van onze opdrachtgever en onze eigen eisen en wensen. Zo mag de appel niet beschadigd raken en moet deze in het midden van het plateau worden gelegd.
De kesselringmethode is een methode om te bepalen welk ontwerp het meest voldoet aan de eisen en wensen. De eisen en wensen worden in een scoretabel op basis van prioriteit becijferd. Vervolgens worden de scoretabellen getoetst aan deze prioriteiten, waarna een cijfer voor ieder ontwerp wordt verkregen.
| Haalbaarheid | Nauwkeurigheid | Stevigheid | Betrouwbaarheid | Monteerbaarheid | Snelheid | Kosten | Wow-factor | Duurzaamheid | Score | |
| Haalbaarheid | + | + | + | + | + | + | + | + | 8 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Nauwkeurigheid | - | + | - | + | + | + | + | + | 6 | |
| Stevigheid | - | - | + | + | + | + | + | + | 6 | |
| Betrouwbaarheid | - | + | - | + | + | + | + | + | 6 | |
| Monteerbaarheid | - | - | - | - | + | + | + | + | 4 | |
| Snelheid | - | - | - | - | - | + | + | + | 3 | |
| Kosten | - | - | - | - | - | - | + | + | 2 | |
| Wow-factor | - | - | - | - | - | - | - | + | 1 | |
| Duurzaamheid | - | - | - | - | - | - | - | - | 0 | |
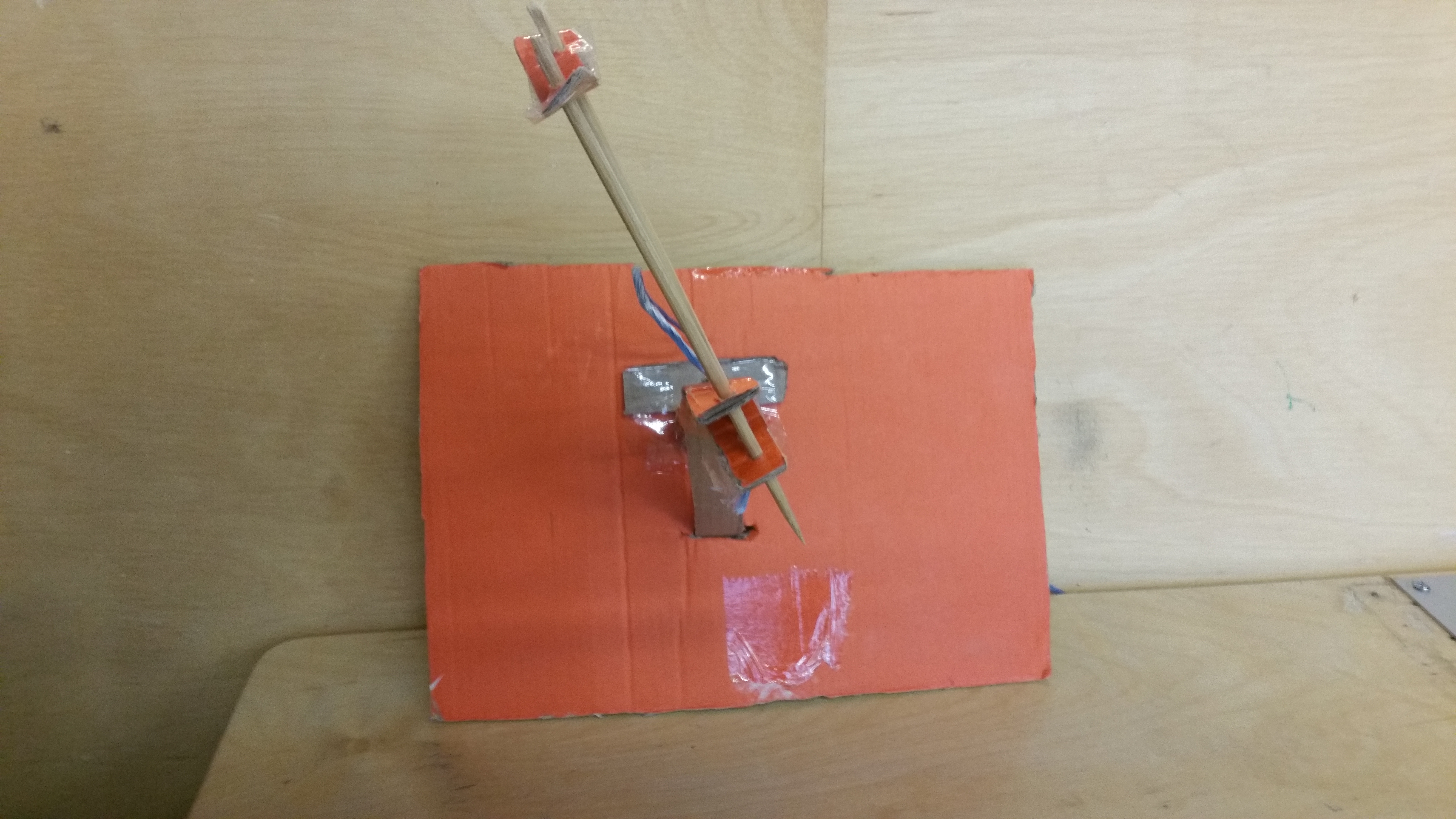
Klik op een naam om het bijbehorende spuugmodel te bekijken.
| kermis-grijper | in verlengde arm | boven grijper | sneeuwbal-grijper | driehoek-grijper |


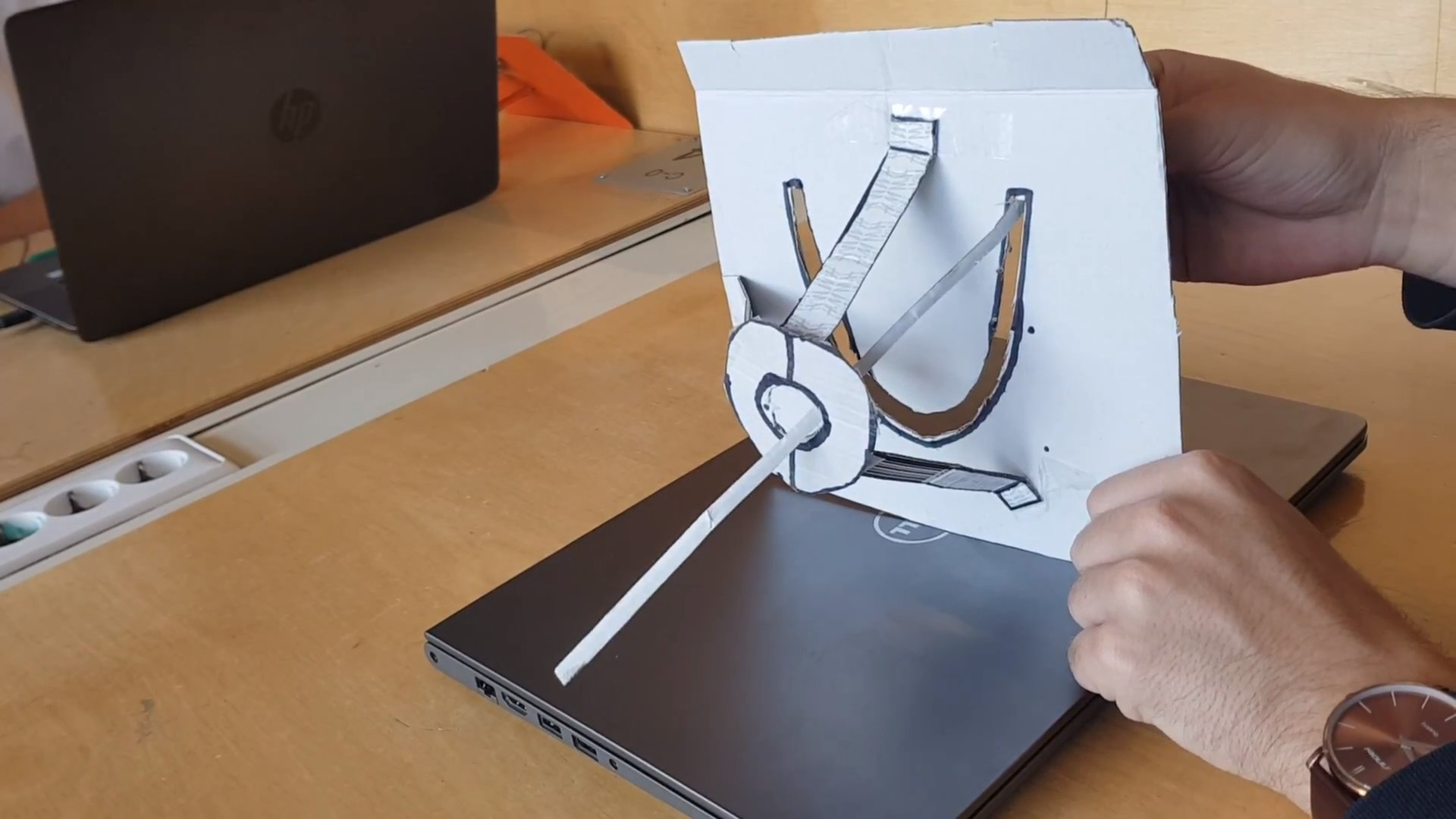





 

 |
|||||
| appel grijpen |
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
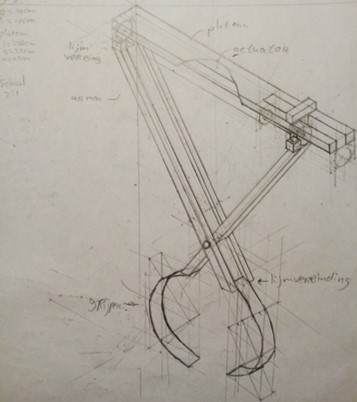
| parallellogram | gleufgrijper | driehoek-arm | scharnier onder | parallellogram dubbel | scharnier boven | gewicht draaier | hijskraan | |||
| arm bewegen |
||||||||||
| elastiek | veren | trekveren | kussens | actuator remmen | ||||||
| appel intact laten |
||||||||||
In de scoretabel is te vinden welk ontwerp de hoogste score heeft gekregen. Naast de tabel is een grafiek gemaakt met op de assen de realiseerbaarheid en de functionaliteit. Zo wordt getracht een ontwerp te kiezen, welk zich zo veel mogelijk in de rechterbovenhoek op de lijn bevindt.
| factor | Ian | Michael | Joost | Roel | Nick | Maarten | Victor | |
| 2 Actuatoren | 1x | 0 | 5 | 0 | 5 | 0 | 0 | 0 |
|---|---|---|---|---|---|---|---|---|
| Nauwkeurigheid | 5x | 4.5 | 3 | 3 | 4 | 4.5 | 4 | 4 |
| Haalbaarheid | 5x | 5 | 2.5 | 3 | 3.5 | 4 | 4 | 4.5 |
| Stevigheid | 4x | 5 | 4.5 | 3 | 4.5 | 4 | 5 | 3 |
| Betrouwbaarheid | 4x | 5 | 5 | 4 | 5 | 4 | 5 | 4 |
| Monteerbaarheid | 3x | 4 | 5 | 2 | 5 | 4 | 4 | 4 |
| Snelheid | 2x | 4 | 4.5 | 3 | 5 | 4 | 4 | 4 |
| Wow-factor | 1x | 3 | 4.5 | 4 | 5 | 4 | 3 | 3 |
| Kosten | 1x | 5 | 5 | 4 | 4 | 4.5 | 5 | 5 |
| Duurzaamheid | 1x | 5 | 5 | 5 | 4 | 4.5 | 5 | 5 |
| Totaal | 31 | 120.5 | 109 | 83 | 118.5 | 107.5 | 113 | 103.5 |

De conclusie van de tabel en de grafiek is dat Ian de meest ideale grijper samengesteld heeft.
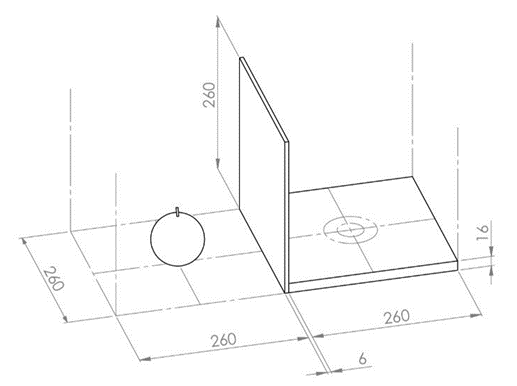
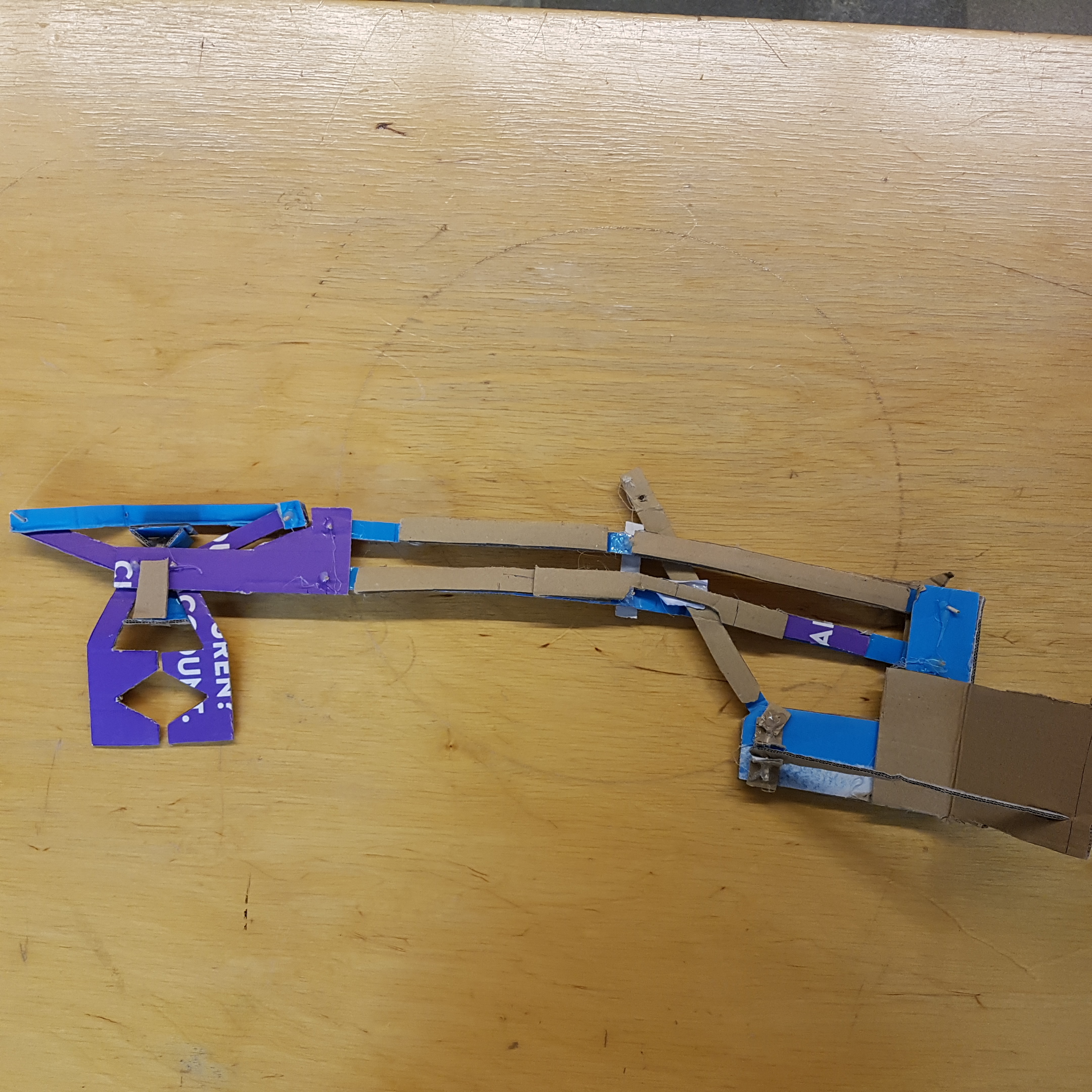
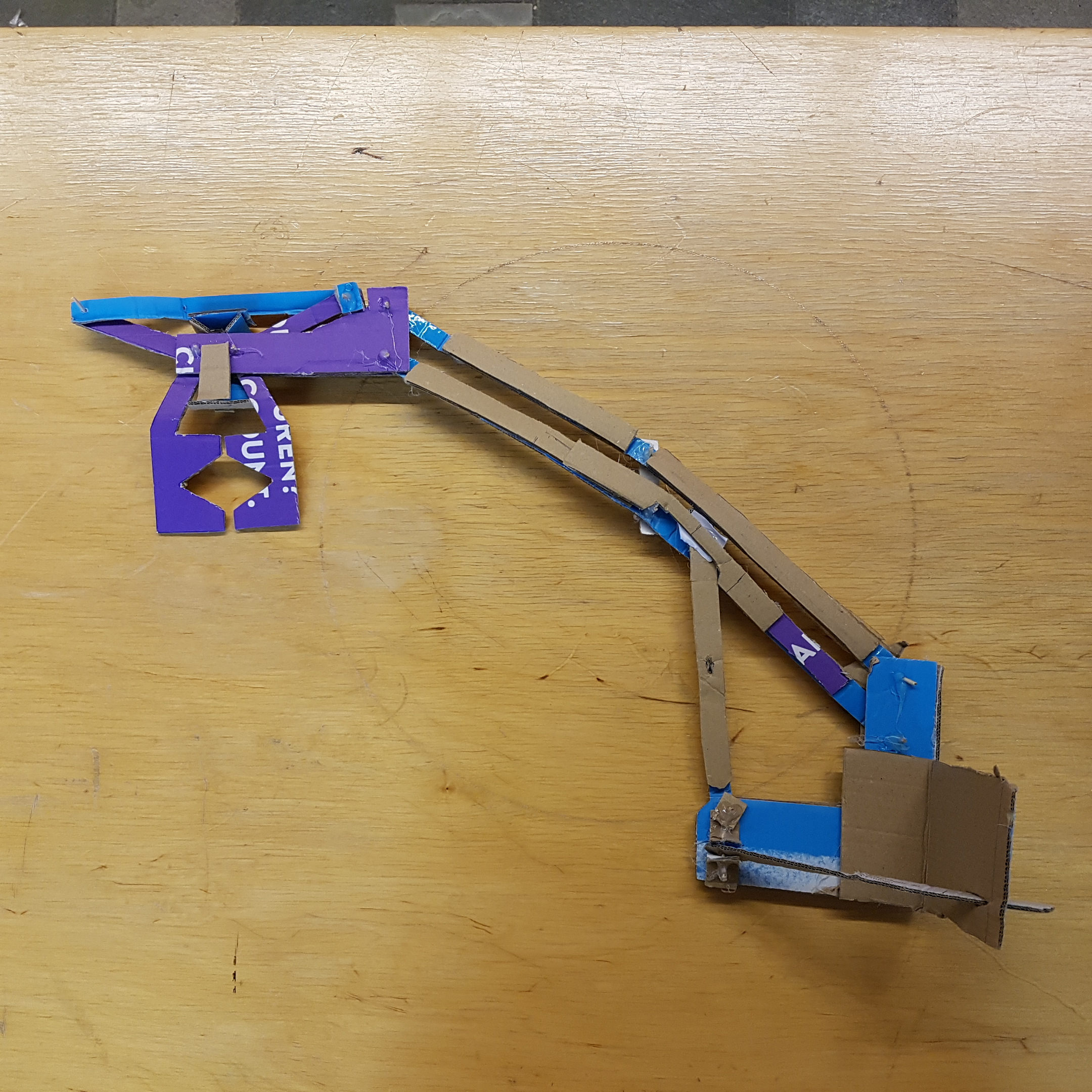
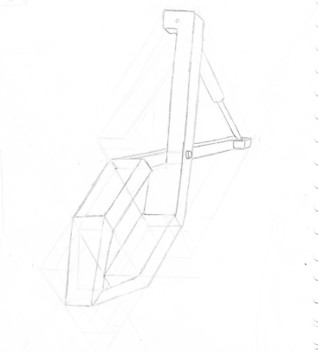
De hoofdfunctie van onze grijparm is om een appel op te pakken en deze om een muur heen op een naastgelegen verhoogd plateau te plaatsen. Bij deze opdracht moet de grijparm aan bepaalde voorwaardes voldoen, welke in het pakket van eisen en wensen beschreven staan. Daarnaast heeft elke groep de beschikking over slechts drie pneumatische actuatoren waarmee alle bewegingen bekrachtigd worden. Ook is er de mogelijkheid om bepaalde onderdelen nauwkeurig door een lasersnijder te laten snijden uit PMMA, ook wel bekend als Perspex. Wij hebben onze grijper zo ontworpen dat hij voldoet aan de gestelde eisen, werkt op de 3 actuatoren en nuttig gebruik maakt van de PMMA plaat. Bijgevoegd is een document met een gedetailleerdere uitleg over het verloop van het hele constructie proces, samen met een technische beschrijving van de grijparm. Bijgevoegd is een document met een gedetailleerdere uitleg over het verloop van het hele constructie proces, samen met een technische beschrijving van de grijparm.
Tijdens het testen en berekenen is bekeken of de kracht van de sterkste actuator voldoende is om de arm omhoog te bewegen.
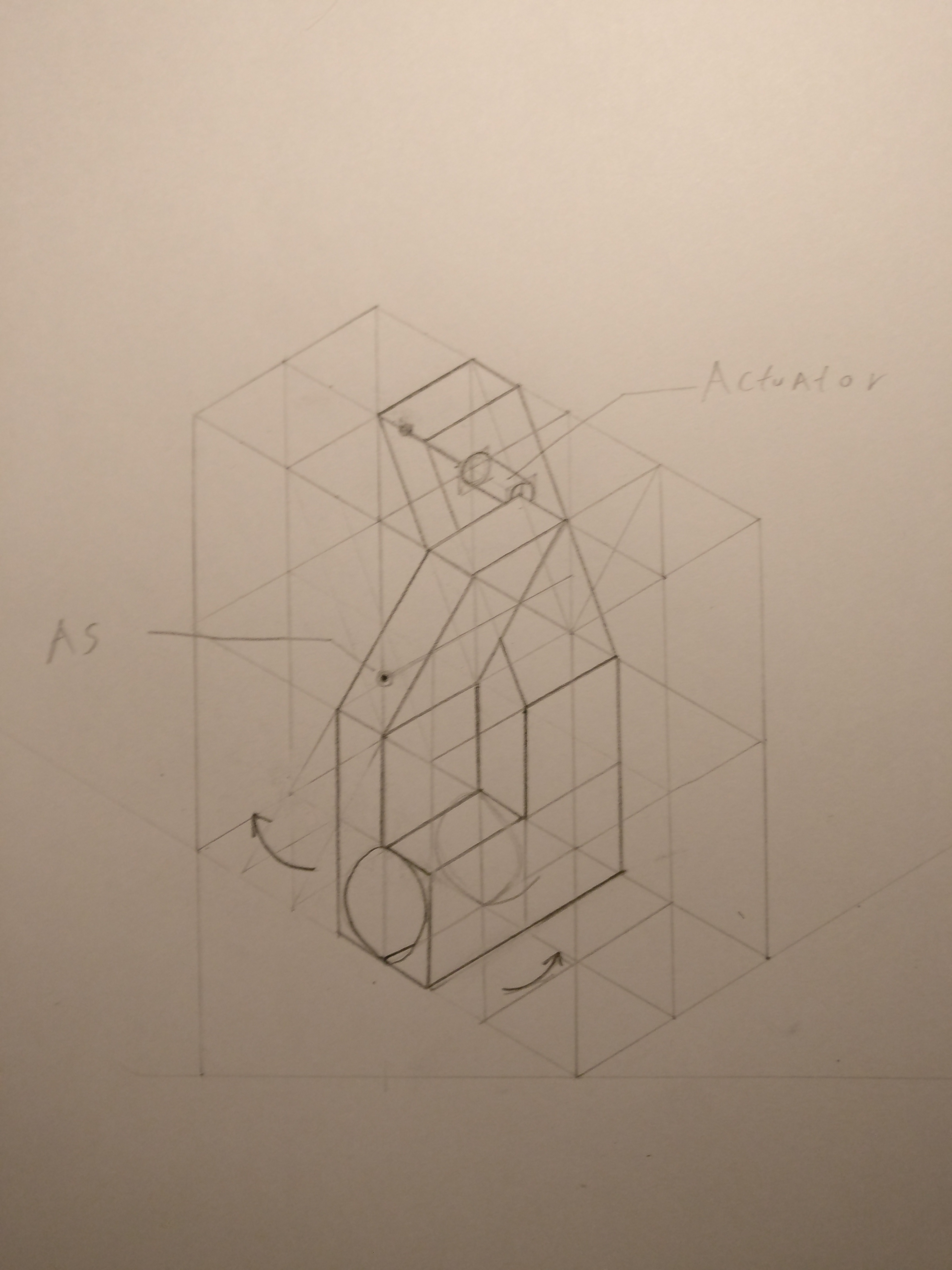
Hieronder staat het vereenvoudigde free-body diagram van de situatie. Voor de simpliciteit zijn de reactiekrachten van de muur weggelaten en is er alleen gekeken naar de krachten die de beweging van de arm genereren en tegenwerken.

Met behulp van een Python script is dit te berekenen en weer te geven in een grafiek.
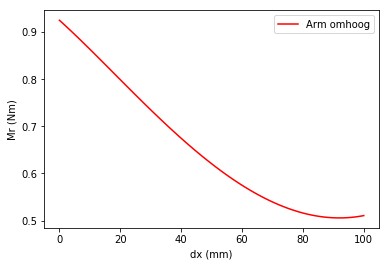 figuur 1
figuur 1 |
De momenten zijn gesommeerd rond het onderste scharnier in de muur waaraan de arm is bevestigd. In figuur 1 staat het resulterende moment in Newtonmeters als functie van de uitschuiving van de actuator in millimeters. Aangezien er gedurende de gehele uitschuifafstand van de actuator een resulterend moment is, is de kracht van de actuator voldoende om de arm omhoog te bewegen. |
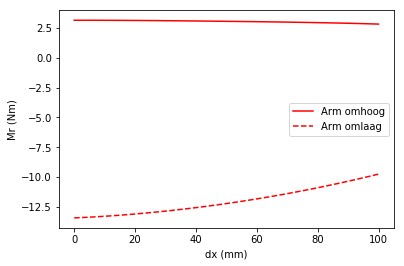
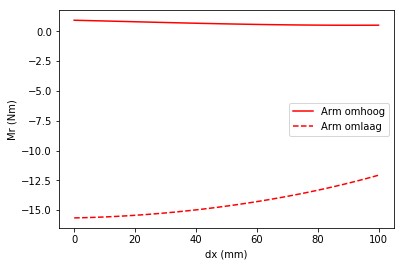 figuur 2
figuur 2 |
In figuur 2 is ook het resulterende moment van de arm weergegeven bij het omlaag bewegen. De lijn "Arm omlaag" geeft negatieve waarden voor het resulterende moment omdat er een rechtsdraaiend moment is (omdat de arm nu omlaag beweegt). Door de schaalverdeling lijkt het zo alsof de lijn "Arm omhoog" is verandert. Dit is echter niet het geval. |
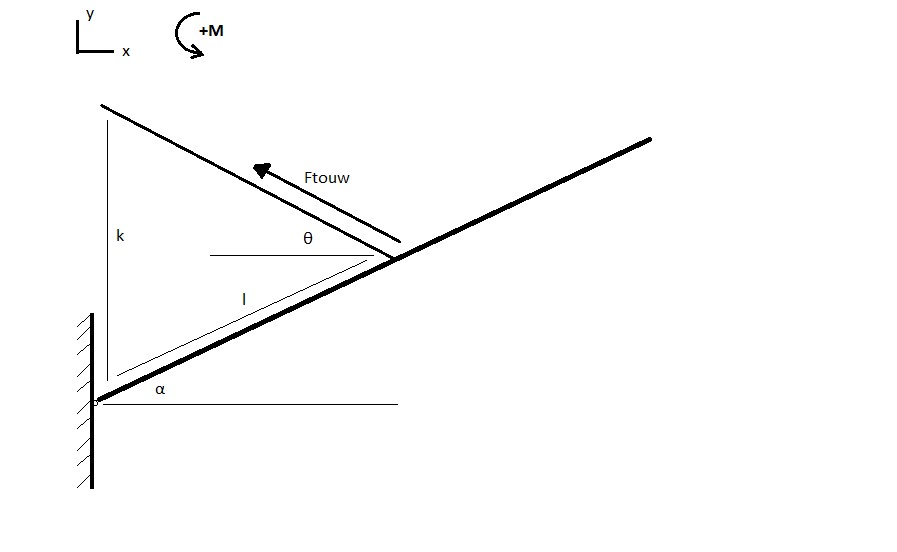 figuur 3
figuur 3 |
Omdat er bij het omhoog bewegen van de arm maar een heel klein moment is (de arm gaat langzaam omhoog) en bij het omlaag bewegen een relatief groot moment (de arm 'klapt' omlaag), is er besloten om een contragewicht van 1,25 kg aan de constructie toe te voegen. Deze moet er enerzijds voor zorgen dat de beweging omhoog 'makkelijker' gaat en anderzijds dat de beweging omlaag rustiger gaat (zodat de constructie heel blijft).
Het contragewicht bestaat uit een massa die aan de andere kant van de muur hangt en via een touw aan de arm verbonden is en daarop een kracht uitoefent. In figuur 3 staat het free-body diagram. Voor de simpliciteit zijn alleen de toegevoegde onderdelen beschouwd en wordt de wrijving van het touw verwaarloosd. |
 figuur 4
figuur 4 |
In figuur 4 staat het resultaat. Zoals men kan zien is het resulterende moment bij het omhoog bewegen groter geworden en het resulterende moment bij het omlaag bewegen kleiner. De arm gaat nu dus 'makkelijker' omhoog en rustiger omlaag. |
Download hier het complete Python script waarmee de berekeningen zijn uitgevoerd en de grafieken zijn gemaakt.
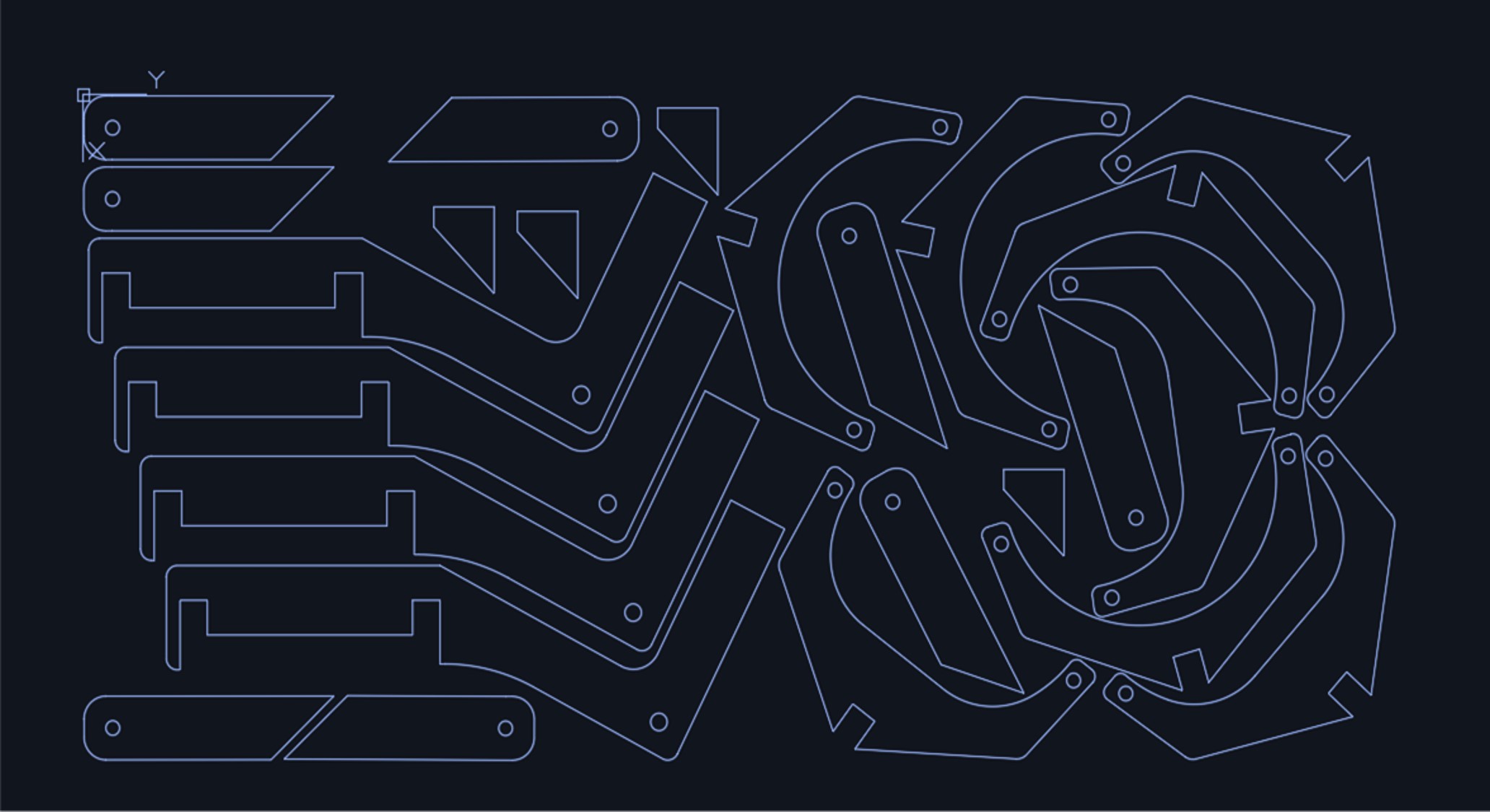
Het laserbestand bevat alle onderdelen van de grijparm die uit PMMA zijn vervaardigd. Deze is getracht zo goed mogelijk te gebruiken zodat er zo min mogelijk restmateriaal overblijft. De laser snijdt over de blauwe lijn heen.
Dit is de video van de uitvoering van de grijparm, waarin het eindresultaat, maar ook de weg er naartoe tentoongesteld is.
Na een aantal keer testen is het duidelijk geworden dat ons mechanisme voldoet aan alle eisen die wij voorafgaand aan het project gesteld hebben. Ook hebben wij appels met verschillende massa's en groottes getest, waaruit is gebleken dat wij ook aan eis 12 en 13 voldoen.
Ons project voldoet niet aan alle beoogde wensen die wij vooraf aan ons project hebben gesteld. Ons project voldoet wel aan wensen 2, 3, 5 en 6.
Het ontwerp is niet vervaardigt uit enkel Perspex, waar alleen de grijper uit bestaat. De rest van onze grijper bestaat onder andere uit aluminium en hout, omdat er te weinig PMMA beschikbaar was om de volledige constructie te maken. Daarnaast hebben wij drie actuatoren gebruikt in plaats van de gewenste twee. Met drie actuatoren is de grijparm beter te kunnen controleren dan met twee wat de nauwkeurigheid en betrouwbaarheid ten goede komt. Die hebben immers een hogere prioriteit. De uitgaven zijn over de grens van 70 euro gegaan. Het beoogde project was niet te realiseren met minder uitgaven, waarvoor het hout, aluminium en verschillende maten bouten en moeren en een werkplek is betaald.
Deze punten kunnen verholpen door worden. Zo zou een grotere plaat Perspex uitkomst bieden aan een grijparm volledig van Perspex. Een ander concept met twee actuatoren, zoals die van Roel of Michael, zou aan wens 4 voldoen. Door toegang te krijgen tot de werkplaats en houtvoorraad, zouden de kosten sterk verminderd kunnen worden.
Na afloop van het project zijn er een aantal verbeterpunten aan het licht gekomen. Het grootste probleem van de grijparm is de plotselinge energietoevoer van de actuatoren. Dit is terug te zien in de schokkige horizontale verplaatsing en de kracht waar de arm mee naar beneden beweegt. De eerste verbeteringen die aan het ontwerp zal worden toegepast is het aanbrengen van dempers of het reguleren van de actuatoren.
Het maken van de grijper hebben wij als erg interessant en leerzaam ervaren. Wij zijn ontzettend trots op het resultaat dat wij hebben neergezet, en blij dat wij dit project succesvol hebben kunnen afronden.
Ons voornemen was om iedere week steevast de planning bij te houden, echter, door de goede samenwerking liepen wij al vrij snel voor op deze planning, waardoor wij ons konden concentreren op het verbeteren van ons concept en ons verdiepen in de stof. Het resultaat is onze grjiparm, de Applegrabler.
Hoewel het project zeer goed verliep, hadden wij nog wel beter naar dempers kunnen kijken, omdat de actuatoren zeer snel bewogen, waardoor ze moeilijk te controleren waren.
Wij hebben vele uren in dit project gestoken, zowel tijdens onze bijeenkomsten als daarbuiten. Ook konden wij het goed met elkaar vinden, wat het project ten goede kwam. Tot slot willen wij onze begeleiders, de heer Paardekooper en Oscar van den Heuvel, bedanken voor het advies dat wij van hun hebben gekregen tijdens onze projecturen.
Dit gehele project ging geheel naar wens, met een ideale, serieuze en aangename projectgroep.
Project 52
Delft, oktober 2017






| Made by Roel |