Parameters en Optimaliseren
Om de beste grijper te maken moeten de parameters van het ontwerp worden geoptimaliseerd.
Onder de parameters van het ontwerp vallen bijvoorbeeld de geometrie en de krachten. Deze moeten geoptimaliseerd worden om het beste resultaat te krijgen. Hiervoor hebben we verschillende krachtenanalyses gemaakt om zo te kijken welke krachten er in het systeem zijn. Op deze manier hebben we ook gekeken naar de grootste til stand.
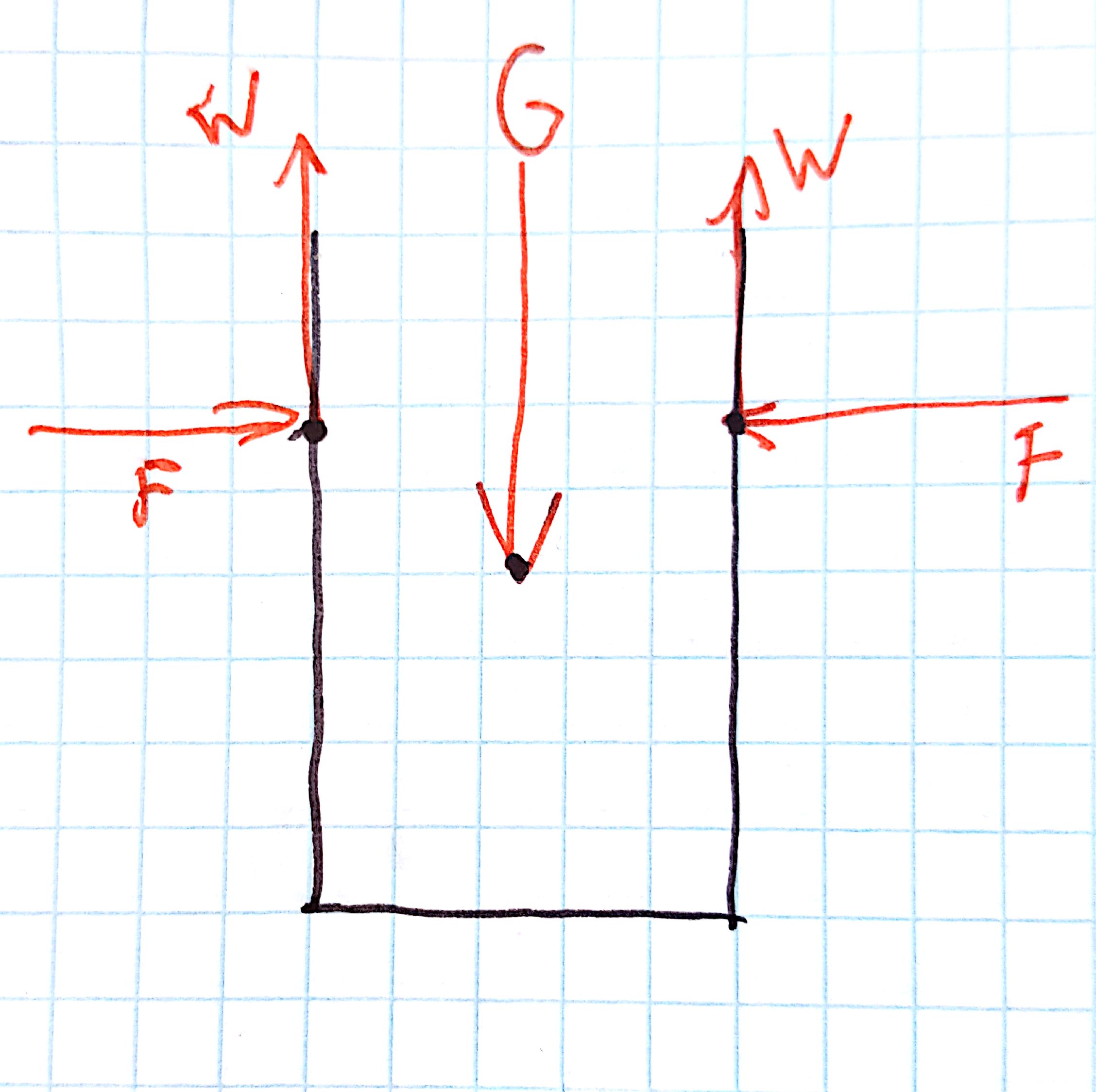
Hieronder staan een aantal krachtenanalyses. De eerste afbeelding is een schematische weergave van het bekertje die door twee klauwen wordt vastgepakt. Het gewicht van het bekertje (met inhoud)
weergegeven door "G" moet worden gecompenseerd door de wrijvingskracht "W" gegeven door:
W=mu*F
Waarin mu de wrijvingscoefficient is en F de kracht van de klauwen.
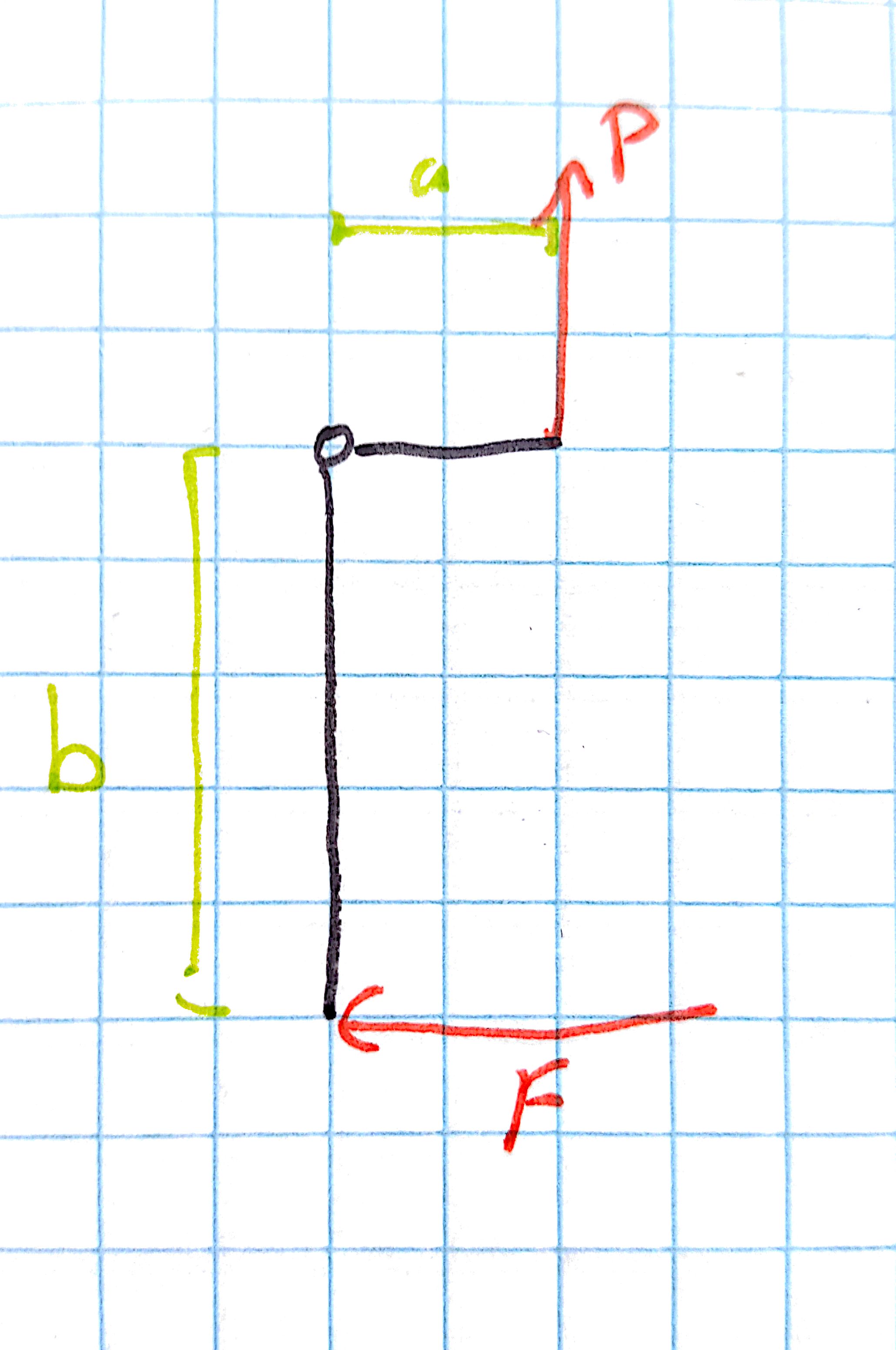
Daarna is een schematische tekening van de klauw zelf weergegeven met daarop de kracht op het bekertje en de trekkracht van de actuator. Voor evenwicht moet gelden:
a*P = b*F
Als we voor G een waarde van 500 gram nemen (=4.905N), voor de wrijvingscoefficient een waarde van 0.4 (wat ongeveer de waarde is voor hout op papier contact) en voor de verhouding (b/a) 2 nemen (zoals we ook in de schets hieronder gedaan hebben). Komen we uit op een benodigde kracht P van ongeveer 1.25kg. Uit eerdere metingen bleek dat de maximale kracht die de actuator kan leveren 1.8kg was. Zoals de grijper nu getekend is, kan hij dus goed functioneren.
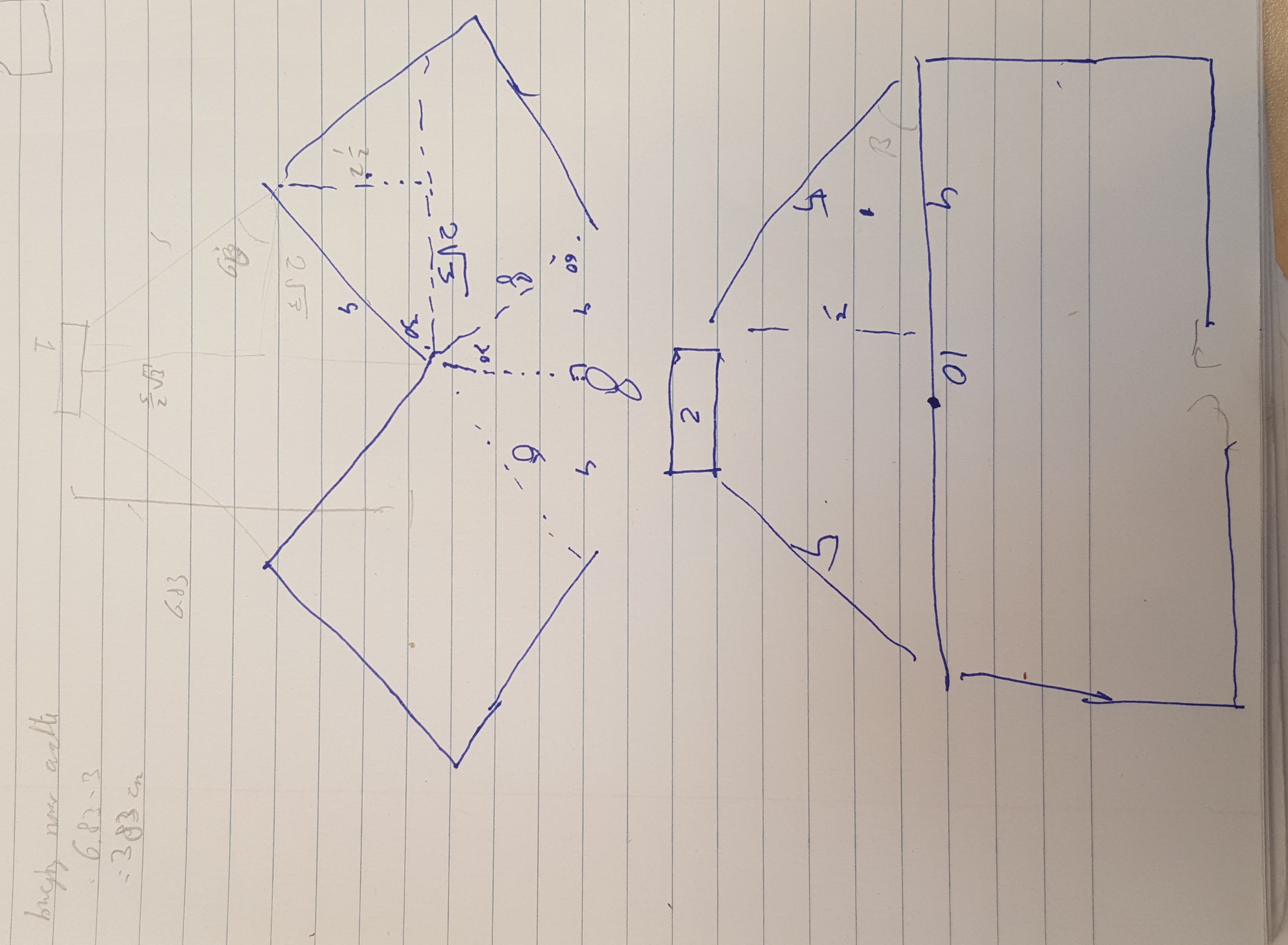
Om de opening van de klauwen te berekenen hebben we eenzelfde soort principe uitgevoerd. In de tekening hiernaast is te zien hoever de actuator achteruit beweegt als de klauwen acht centimeter uit elkaar worden gehaald.
Deze grootte van acht centimeter is de iets meer dan de diameter van het bekertje dat opgetild moet worden. De klauwen moeten iets verder open kunnen om er zeker van te zijn dat het bekertje er altijd in past.
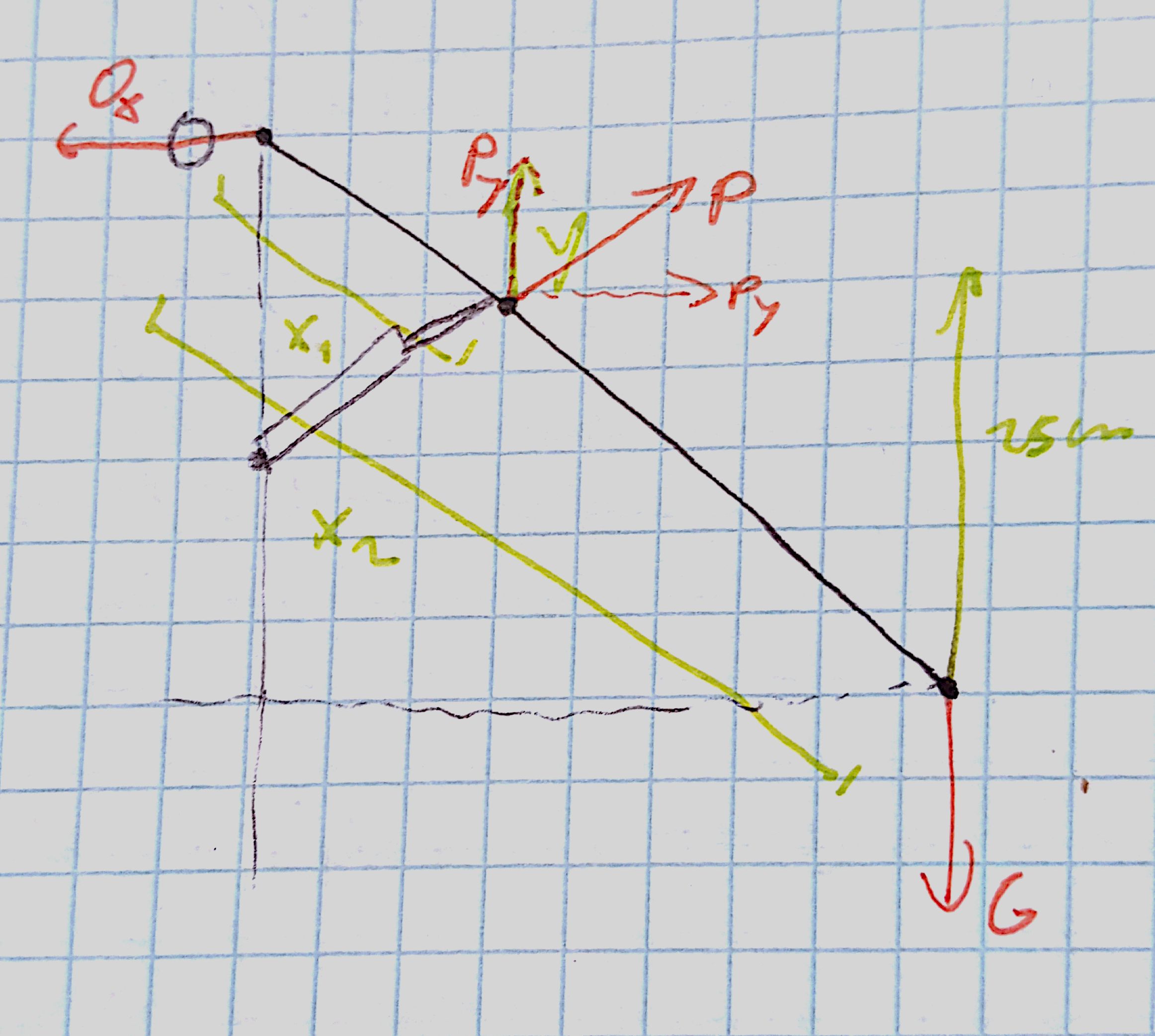
De getallen in de afbeelding zijn allemaal in centimeters, behalve de hoeken deze zijn in graden.
((x1*sin(alfa))*Py)+((x1*cos(alfa))*Px)=((x2*sin(alfa))*G)
Waar Py= P*sin(theta), Px=P*cos(theta), alfa de hoek tussen de arm en het bord, theta de hoek tussen de actuator en de horizontale lijn, x1 de lengte vanaf O tot het aangrijpingspunt van de actuator, x2 de totale lengte van de arm, P de drukkracht en G het gewicht.
Ook kan zo worden berekend hoever de actuator moet uitschuiven. Deze waarde wordt gegeven door de formule:
y=(x1/x2)*25
Hierin is dus de verhouding x1/x2 belangrijk. Aangezien de actuator maximaal 10cm kan uitrekken, mag deze verhouding maximaal 10/25 zijn. Oftewel x1 is maximaal 0.4x2