Elke groepsdeelnemer heeft een concept bedacht. Hiervoor werd het onderstaande morfologisch schema gebruikt. Men koos via dit schema per onderdeel één van de opties, om vervolgens het geheel uit te werken tot een in de praktijk werkende grijper.
Individuele concepten:
Nu zullen we de concepten bepreken die ieder goeps lid heeft uit gewerkt.In het tabel hieronder is zichtbaar welke persoon welke onderdelen uit het morfologische schema heeft gekozen.
|
Berk |
Daan |
Matt |
Wim |
Antonio |
David |
Bob |
Grijper
|
3
5 |
4 |
6 |
5
6 |
3
5 |
2 |
3 |
Positie bevestiging |
3 |
2 |
2 |
2 |
3 |
2 |
2 |
Beweging A -> B |
(1) |
2 |
2 |
2 |
3 |
2 |
4 |
Beweging C -> D |
5 |
1 |
4 |
5 |
- |
1 |
3 |
Tabel keuze onderdelen individuele concepten
David Janssen:
Mr. Janssen koos voor het bord als bevestigingsoptie. Hieraan zou d.m.v. bouten en moeren een kogelscharnier bevestigd worden, die op zijn beurt weer bevestigd wordt aan de arm van de grijper. Door het kogelscharnier zou de arm zowel naar boven als van links naar rechts kunnen bewegen. Verder werd er gekozen voor een actuator onder de arm om een verticale beweging te bewerkstelligen. Ook de horizontale beweging zou worden aangedreven door een actuator, maar dan bevestigd aan de zijkant van de arm. Ten slotte werd als grijper gekozen voor optie 2 oftewel een grijper die typisch gebruikt wordt in grijpspelmachines, die vaak te vinden zijn op de kermis en in arcade speelhallen. Echter werd later toch gekozen voor optie 3 voor de grijper. Met als voornaamste reden dat het aandrijven van grijper 2 met een actuator zeer gecompliceerd zou zijn in tegenstelling tot het aandrijven van grijper 3.
Handtekening concept David
Wim Kok:
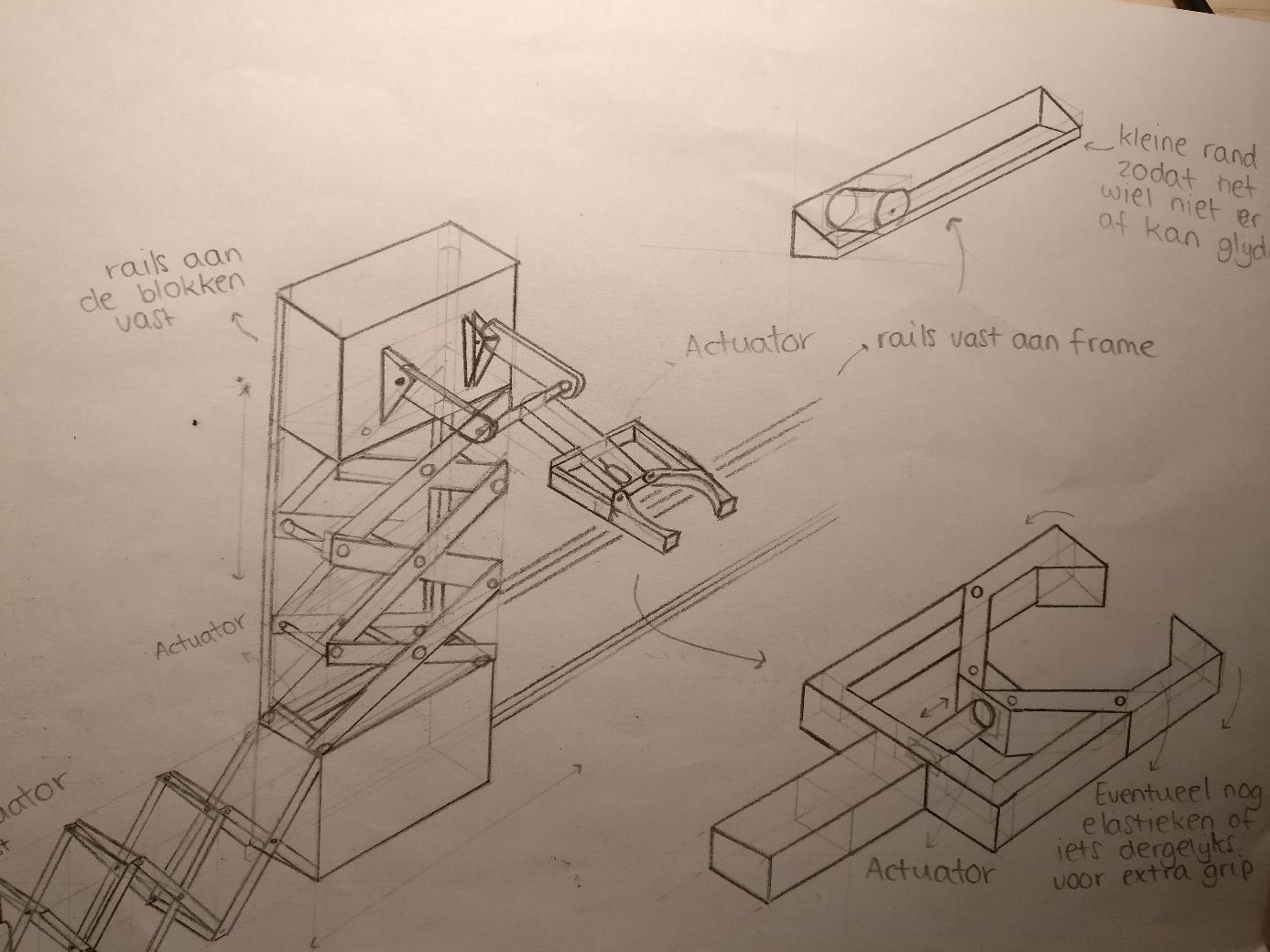
Bij dit concept was er ook gekozen om het bevestiging bord te gebruiken om de opstelling te monteren. Hier aan worden dan vier armen bevestigt met een pinscharnier dezen armen zijn daarna weer via een pinscharnier gemonteert aan dezlefde plaat waardoor er een vierstangen mechanisme onstaat. De plaat wordt vervolgens bestuurt in een vertcale beweging door een actuactor die aan het bord is bevestigt waardoor het mogelijk wordt de arm te bewegen in het richting van het platform hierdoor bevindt zich geen enkel deel van de opstelling zich boven het platform. De arm is verbonden op een as die met een kogellager in de plaat. Op deze as is een tand wiel waardoor het mogelijk wordt de as te roteren. Hiervoor wordt een tandheugel met rechtgeleiging en een actuator bevestigt aan de plaat, dit maakt de beweging mogelijk om de appel te verplaatsen van de linkerkant van het platform naar de rechter kant. Als grijper is er gekozen voor een simpel ontwerp dat gesloten wordt door het in schuiven van de actuator terwijl het sluiten van de grijper wordt gedaan door een set veren hierdoor zijn de krachten op de appel eenvoudig te bepalen. In de volgende figuren zijn een schets van het concept zichtbaar een een kartonnen model van het draai mechanisme.
Het voordeel van dit ontwerp is dat wanneer alle afmetingen nauwkeurig zijn berekent dat het mogelijk is om de appel heel nauwkeuring neer te zetten op het platform. Een ander voordeel is dat dit ontwerp heel snel de operatie kan uitvoeren. Een nadeel van dit ontwerp is dat het door de groote onderdelen waarscijnlijk niet past op de gekregen PMMA plaat. Een andere punt is dat het ontwerp van het tandwiel in PMMA moeilijk is en dat misschien te zwak is om deze taak uit te voeren.
Matthew Fankhauser:
De kern van dit ontwerp is een hefboommechanisme waarmee de grijper het hoogteverschil tussen
bodem, houten muur en platform kan overbruggen. Voor de draaibeweging kan het mechanisme aan
het boord met een scharnier worden bevestigd. Voor dit ontwerp zijn 3 actuatoren nodig. Twee voor
het hefboom- en draaimechanisme en eentje voor het grijpmechanisme. De actuator wordt aan het
korte einde van de hefboom bevestigd en duwt deze omlaag, zodat het einde met de grijper omhoog
beweegt. De andere actuator zit aan de onderkant van het hefboommechanisme vast en duwt deze
van de plaat, zodat de grijper om een bepaalde hoek draait.
Het ontwerp heeft natuurlijk voor- en nadelen.
Voordelen:
- De grijper kan grotendeels uit PMMA worden gemaakt.
- Het boord kan als basis worden gebruikt
- Door 2 parallelle hefbomen blijft de grijper altijd horizontaal
- Simpel idee
Nadelen:
- Hefboommechanisme heeft veel scharnierpunten, waar veel krachten optreden en wrijving
ontstaat.
- Is er genoeg PMMA om dit concept uit te voeren?
Handtekening concept Matthew
Bob de Jager:
In dit concept wordt er alleen gebruik gemaakt van scharnieren om de grijper zowel horizontaal als
verticaal te verplaatsen. Het onderste blok zal bevestigd zijn aan een rails aan het frame, waardoor deze
zich op gelijke hoogte van links naar rechts en andersom zal kunnen verplaatsen. Aan dit blok zitten
vervolgens ook rails ( nu niet bevestigd aan het frame ), waarover het bovenste blok zich naar boven en
naar beneden kan verplaatsen. Deze verplaatsing zal mogelijk gemaakt worden door de actuatoren in en
uit te schuiven tussen de uiteindes van de scharnieropstelling. Hierdoor zullen de uiteindes dichterbij of
verder weg van elkaar gaan staan en zullen de scharnieren zich dus uit- of invouwen. Om deze
verplaatsing zo soepel mogelijk te maken zullen we wieltjes vastmaken aan de blokken om deze
vervolgens op de rails te plaatsen.
Dit systeem zorgt dan ook voor een van de grootste voordelen van dit concept, namelijk de stabiliteit.
Verder is het systeem erg eenvoudig om in elkaar te zetten en zal dit dus ook weinig tijd kosten. Door de
vele scharnieren zal dit concept echter wel snel veel gaan kosten, wat tegen een van onze wensen
ingaat.
Daan Lankhuizen:
Dit concept maakt tweemaal gebruik van een vierstangensysteem. Eerst een systeem waarbij de verticale afstand wordt overbrugt m.b.v. de grote actuator en daarop een systeem die de horizontale afstand overbrugt met een kleine actuator. Beide systemen bestaan uit vier stangen en twee houten blokken. De actuatoren duwen op een stang in die in het midden van de stangen. Verder bestaat de grijper uit twee ronde stangen, waarvan er één vast staat en de ander draait om een scharnier die geduwd wordt door de actuator. De gehele arm is aan de bovenkant van het systeembord bevestigd. Bij het uitschuiven van de grote actuator beweegt de arm naar beneden tot de gewenste hoogte waarna de tweede actuator het blok met de grijper horizontaal draait. Met de laatste actuator wordt de scharnierende ronde stang tegen de appel gedrukt en wordt de appel gegrepen.
Dit ontwerp maakt gebruik van simpele constructies, echter biedt deze constructie niet veel stevigheid en door de los bewegende delen en het feit dat de PMMA staven gedraaid bevestigd zouden moeten worden. Verder werd dit concept uiteindelijk niet gekozen, omdat het niet goed genoeg uitgewerkt was.
Handtekening concept Daan
Berk Colak:
Dit concept wordt gebouwd op een basis, los van het gegeven bord. Er zit een kogellager in de basis verwerkt. Door deze kogellager zit een as, waarop een tandwiel is gemonteerd om een draaibeweging mogelijk te maken. Dit tandwiel wordt gedraaid door een tandheugel die door middel van recht geleiding en een actuator langs het tandwiel wordt geschoven. De basis, met daarop de arm en het tandwiel, staat náást het platform. De arm draait juist van het muurtje af, waardoor het een (ongeveer) 300 graden beweging maakt de andere kant op, totdat de appel losgelaten kan worden. Het grijpmechanisme is later aangepast, maar het aanvankelijke idee was zoals op de tekening. In dit geval is het verstandiger om de foto aandachtig te bekijken, in plaats van een grote hoeveelheid aan onnodige woorden. Ook in dit geval telt: De tekening zegt meer dan duizend woorden.
Handtekening concept Berk A
Handtekening concept Berk B
Antonio Aziz:
Het idee is dat verplaatsing in de horizontale vlak wordt gerealiseerd door een actuator die van een rechtlijnige beweging, een ronddraaiende beweging maakt. De manier die kan worden gebruikt lijkt op de werking van een cilinder (zie foto). De tandwiel komt vervolgens in beweging waardoor de ketting die gespannen is om 4 tandwielen ook in beweging komt. Daarop komt een basis met daarin een kogellager. In de binnenkant van de kogellager zet ik een houten cilinder met daarop de basis voor de arm/grijper. Ik heb ze allebei in een aparte tekening getekend.
Handtekening concept Antonio
Keuze:
Nadat de zeven concepten waren ontworpen was het de bedoeling om er een verder uit te werken. Hiervoor hadden we een aan tal kriteria opgeteld om hte beste concept te kiezen. Deze waren:
- Kosten: Wat kost het concept om te realiseren en hoe past dat in ons budget.
- Snelheid: Hoe snel voert het concept de gehele operatie uit.
- Preciesie: Hoe accuraat legt het concept de appel neer op het platform
- Soepel: Wat is de invloed van het in en uitschuiven van de actuatoren op de rest van het concept.
- Stevigheid: Wat is de kans dat het concept kapot gaat tijdens de operatie.
- Haalbaarheid: Kunnen wij dit ontwerp binnen te tijd bouwen.
Deze kriteria werden een waarde toegewezen voor elk concept tussen de 1 en de 5 waarbij 5 het beste resultaat is. Het schema wat hier uit voort gekomen is, is te zien in het volgend figuur. Eerst zijn all ontwerpen waarvan de haalbaarheid laag was uitgesloten, zoals het cocept van antonio dat moeilijk was te realiseren vanwege de grote hoeveelheid tandwielen. Daarna is op basis van de kriteria een top 3 bepaalt. Hieruit kwammen de designs van Berk, Matt en Wim. Op basis van een discusie in onze groep hebben we gekozen voor Berk's concept uit deze top 3. In dit geval werd de doorslag gegeven door het feit dat dit concept 2 actuatoren gebruikte.
|
|
Berk |
Daan |
Matt |
Wim |
Antonio |
David |
Bob |
Eisen |
Weegfactor |
Score |
Score |
Score |
Score |
Score |
Score |
Score |
Kosten |
1 |
2 |
4 |
4 |
3 |
2 |
4 |
2 |
Snelheid |
2 |
4 |
3 |
3 |
4 |
2 |
3 |
3 |
Precisie |
5 |
4 |
4 |
4 |
4 |
5 |
4 |
4 |
Soepel |
3 |
4 |
3 |
3 |
4 |
3 |
3 |
3 |
Stevigheid |
4 |
3 |
2 |
4 |
3 |
3 |
3 |
4 |
Haalbaarheid* |
|
4 |
3 |
4 |
3 |
3 |
2 |
2 |
Totaal |
|
54 |
47 |
55 |
55 |
52 |
51 |
53 |
Tabel concept keuze (* Niet meegenomen in totaal)